Programmazione Lineare
Problemi di Ottimizzazione
Classificazione
- Ottimizzazione Matematica: problemi con 1 solo decisore, 1 solo obiettivo
- Ottimizzazione Multiobiettivo: 1 solo decisore, tanti obiettivi
- Game Theory: problemi con tanti decisori, ognuno vuole max profitto
- Ottimizzazione stocastica: problemi con dati incerti
I problemi di ottimizzazione hanno una struttura comune: un obiettivo e delle restrizioni.
L’obiettivo è il criterio di scelta da seguire, le restrizioni sono i vincoli o le limitazioni delle possibili scelte.
Definizione
Ottimizzare vuol dire la scelta migliore per soddisfare l’obiettivo, rispettando le restrizioni.
Approccio modellistico:
- Analisi del problema e raccolta dei dati
Individuare l’obiettivo e le restrizioni; - Formulazione del problema
Costruzione del modello matematico: determinare le variabili, individuare l’obiettivo, esprimere i vincoli - Studio del modello
Esistenza delle soluzioni, unicità, etc… - Soluzione numerica
- Validazione del modello
Ottimizzazione Matematica
Un problema di ottimizzazione è del tipo
Oppure:
Con:
regione ammissibile (insieme scelte/ dei vincoli)
soluzione ammissibile
funzione obiettivo
Ogni problema di massimo può essere scritto come problema di minimo. Risulta infatti
Classificazione dei problemi
Problemi lineari: la funzione obiettivo e i suoi vincoli sono funzioni lineari del tipo:
Problemi non lineari: presenza di funzioni lineari.
Programmazione Lineare
Forma generale:
Si chiamano variabili decisionali. Valgono le ipotesi:
- Additività: si sommano i contributi delle variabili;
- Proporzionalità: ogni variabile dà un contributo proporzionale a se stessa;
- Continuità: Le variabili sono reali.
Forma Generale Compressa
Link to original
Metodo Grafico per la programmazione Lineare
Rette nel piano
Una retta ha un’espressione del tipo
è un vettore ortogonale alla retta appena definita, che punta verso il semipiano Trasposto perché i vettori sono sempre in colonna. I problemi di programmazione lineari in 2 variabili possono essere risolti graficamente.
Metodo Grafico
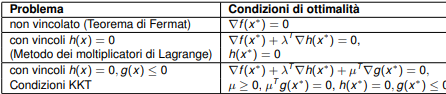
Si basa sulla rappresentazione geometrica della regione ammissibile, dei vincoli e della funzione obiettivo sul piano cartesiano.
Nei problemi di PL i vincoli sono disequazioni lineari
quindi semipiani. Ponendo i vincoli in forma di retta, otteniamo il grafico:
E difatti la soluzione ottima sarà il punto
Come scegliere il semipiano giusto
Si prende il punto test
e si sostituisce in , difatti in questo caso si ottiene , che è vero. Il semipiano giusto in questo caso è quello che contiene il punto test. Osservazione
Se i coefficienti della funzione obiettivo non sono tutti nulli, la soluzione non è mai interna alla regione ammissibile. Quindi starà sul bordo.
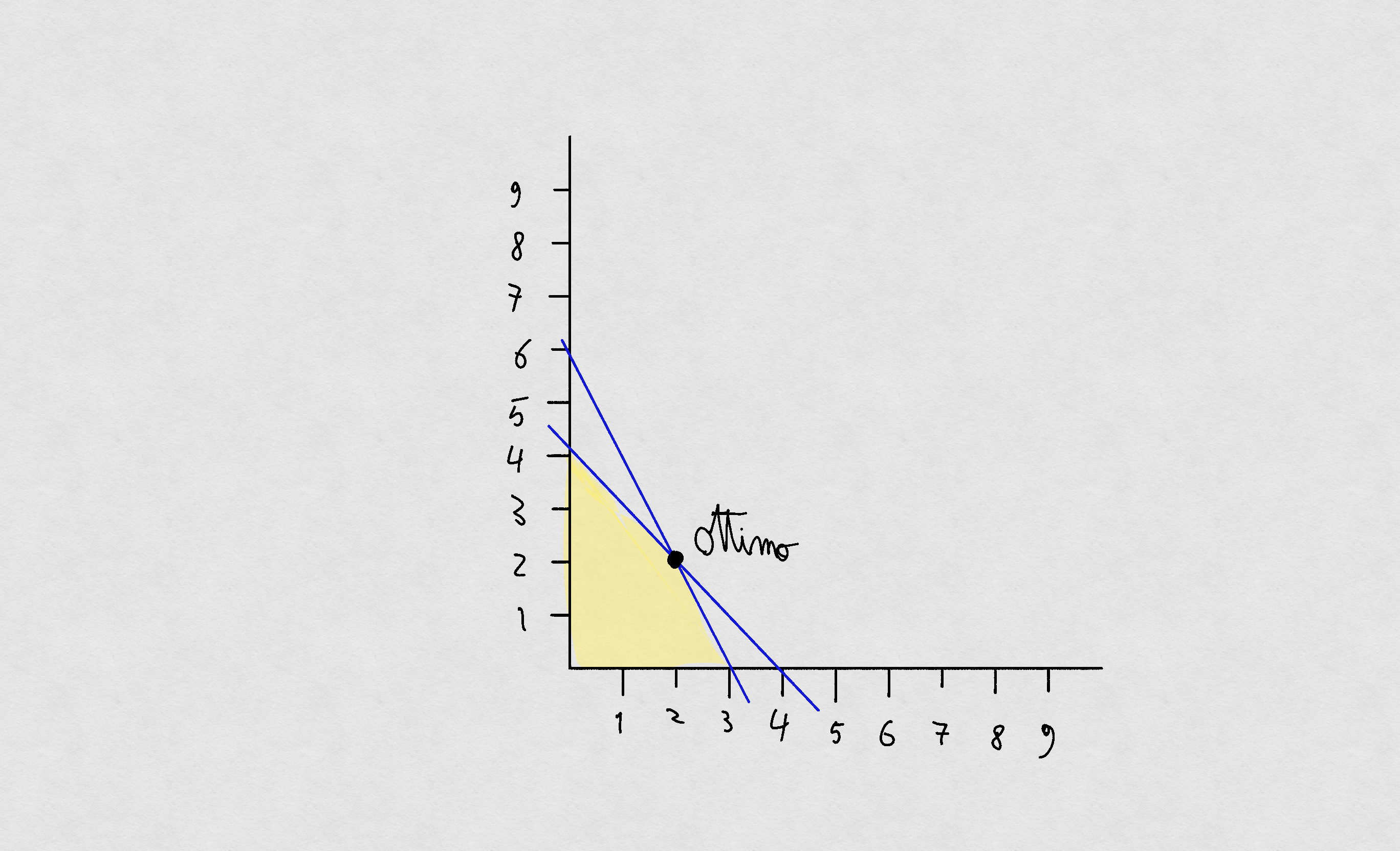
Un’altra procedura è quella di considerare il fascio di rette generato dalle rette parallele e ortogonali a quella che rappresenta la funzione obiettivo, cioè quindi al vettore
nell’esempio, in direzione dei valori crescenti di .
La soluzione ottima sarà l’ultimo punto ammissibile comune con la retta del fascio.
Link to originalProcedura
- Rappresentiamo i semipiani di vincoli sul piano cartesiano;
- Per rappresentare la funzione obiettivo, tracciamo le linee di livello della f.o. , cioé il fascio di rette
al variare di k. - Le linee di livello sono parallele tra loro e ortogonali al vettore
. è il valore della f.o che dobbiamo max/minimizzare. - Per massimizzare: trasliamo la retta della f.o. seguento la direzione del vettore.
- Per minimizzare: andiamo in direzione opposta.
- Fra tutte le linee di livello prendiamo quella che ha il valore max (min) di k e si ottiene la soluzione prendendo l’ultimo punto comune tra la retta del fascio e la regione ammissibile
Geometria della programmazione lineare
Mettiamo in luce le proprietà geometriche della regione ammissibile.
Iperpiano
L’insieme delle soluzioni di un’equazione lineare in
variabili. Semispazio
L’insieme delle soluzioni di una disequeazione lineare in n variabili.
O, per riassumere:
retta iperpiano semipiano semispazi Problema di PL
Sistema di equazioni e diseguazioni lineari in
variabili intersezione di iperpiani e semispazi chiusi. Poliedro
Intersezione di un numero finito di iperpiani e semispazi chiusi. Alias: un insieme convesso (vedi sotto)
Combinazione convessa
Sia
, è il punto con Propria
- La combinazione convessa di 2 punti dà il segmento che ha per estremi i due punti considerati;
- La combinazione convessa di 3 punti dà il triangolo
Combinazione convessa generale
Siano
, il punto si chiama combinazione convessa di questi punti. Con e la somma di tutti i Insieme convesso
Un insieme
si dice convesso se anche il punto appartiene a Cioè dati due punti di k, il segmento ottenuto è tutto convenuto in . Vertice
Un Vertice di un poliedro è un punto che non può essere espresso come combinazione convessa propria (cioè con
) di altri punti del poliedro. Un Vertice è un estremo di un segmento non può trovarsi “dentro” un segmento generato da altri punti. Per riassumere
- La regione ammissibile di un problema di PL è un poliedro
è convessa; - I problemi di PL sono problemi convessi
Gli ottimi locali sono globali. Teorema Fondamentale della PL
Dato il problema:
Teorema Fondamentale della PL
Se ha una soluzione ottima, allora esiste un vertice ottimo.
Conseguenza: La soluzione ottima va cercata fra i vertici
Esistono sempre vertici?
Risulta che un poliedro ha vertici
non contiene rette. C’è una sola situazione nella quale la regione ammissibile non ha vertici, contiene rette, e ha soluzioni ottime. Il poliedro è una striscia.
Ci sono
Link to originalsoluzioni ottime che sono tutti i punti della retta , e quindi il valore ottimo della funzione obiettivo è 2.
Algebra della programmazione lineare
Cerchiamo di esprimere il concetto di vertice in modo algebrico, sfruttando la struttura di vincolo.
Forma Standard
Si dice Forma Standard di un problema di PL, il problema scritto nella forma:
con
Caratteristiche:
- Problema di minimo;
- Vincoli di uguaglianza;
- Termini noti
- Variabili
Ogni problema di PL può essere scritto in FS.
Regole di conversione
- Un problema di max si scrive come problema di min:
- Vincolo di
si trasforma in vincolo di aggiungendo una variabile di SCARTO (SLACK)
- Vincolo di
si trasforma in vincolo di sottraendo una variabile di SURPLUS
- Variabile
, Si moltiplica per -1 e si rinomina:
si sostituisce in tutti i vincoli e nella f.o. - Variabile
libera in segno, si introducono due variabili , e si pone , e poi si sostituisce la variabile. Forma Standard e Vertici
Partendo da un esempio, consideriamo il poliedro:
Se poniamo
Troviamo la soluzione , le componenti sono è un vertice. Generalizzando l’esempio, consideriamo:
con:
E richiediamo che
. Perché?
- Se
vuol dire che il sistema ha un’unica soluzione, cioè nella regione ammissibile c’è un solo punto, e quindi non c’è alcuna ottimizzazione da effettuare, non avendo alcuna altra scelta. - Se
vuol dire che ci sono dei vincoli in eccesso, ridondanti. Per trovare i vertici…
- Annulliamo n-m variabili;
- Risolviamo il sistema nelle rimanenti variabili;
- Se le variabili sono tutte
, abbiamo un vertice. Dobbiamo però capire come scegliere le variabili da annullare.
Base Vettoriale
Data una matrice
una base è una sottomatrice di formata da colonne linearmente indipendenti. Se
. Individuata una base B, la matrice si partiziona:
Supponiamo che la matrice B sia fatta con le prime
colonne di . Difatti,
è quadrata: , le altre colonne di formano la matrice non di base . La matrice
si partiziona quindi in e , ed anche il vettore si partiziona in: :
componenti associate alla colonna di ; componenti associate alla colonna di Il sistema
allora si scrive:
La matrice B è invertibile, perché composta da colonne linearmente indipendenti. Per questo possiamo moltiplicare a sinistra per
Per trovare un vertice la scelta naturale è porre
, cioè porre a zero le variabili fuori base. Soluzione di Base
Dato il sistema
si dice soluzione di base il vettore , cioè e (Componenti di base sono date da e quelle fuori base sono nulle).
- Se
la soluzione di base si dice ammissibile. - Se qualche componente di base è nulla, si dice degenere
Teorema 1
Dato il poliedro
è un vertice se e solo se è una soluzione di base ammissibile
- Per il Teorema Fondamentale della PL
bisogna cercare l’ottimo tra i vertici; - Per il Teorema 1 appena definito
bisogna cerca l’ottimo tra le soluzioni di base ammissibile. Quante soluzioni di base ammissibile ci sono?
Il numero di sol di base è legato al numero di basi B. Possiamo estrarre da A
sottomatrici di ordine m. Fra queste sottomatrici, ve ne sono alcune non invertibili, e alcune che generano soluzioni di base non ammissibile. Quindi, il numero di soluzioni di base è al più Questa è la base del Metodo del Simplesso
Link to original
Metodo del Simplesso
Preliminari al Metodo del Simplesso
Schema Generale
- Si sceglie un vertice
- Se Test Ottimalità
- Se Test Illimitatezza
- Si cambia vertice altrimenti
Forma Canonica
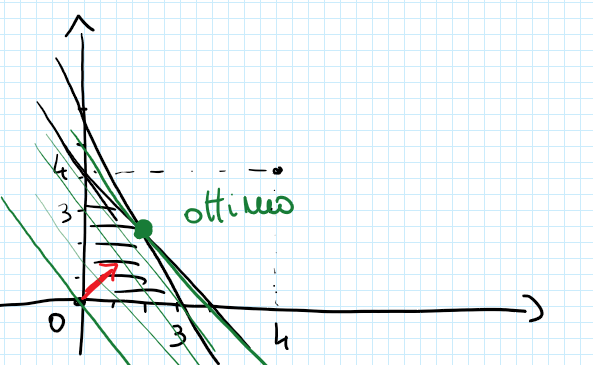
Sia dato un problema di PL in forma standard, e sia B una base, il problema si dice in forma canonica se tutte le variabili di base e la funzione obiettivo son espresse in funzione delle variabili fuori base.
Costi Ridotti
Dato un problema di PL in forma canonica (o anche standard) rispetto alla base B, i coefficienti delle variabili
nella f.o. si dicono costi ridotti delle variabili rispetto alla base B Considerando un problema in FS:
Forma Canonica
(cioè tutto espresso in funzione di
)
La f.o. diventa quindi:
- =
f.o in forma canonica Perciò, il vettore dei costi ridotti:
Si partiziona in: tutte le variabili di base, con costi ridotti nulli costi ridotti delle variabili fuori base Test di Ottimalità
Si basa sul segno dei costi ridotti. Se i costi ridotti sono tutti
, la soluzione di base corrente è ottima. Sia
la soluzione di base corrente.
Sappiamo che i costi ridotti delle variabili fuori base sono
, idem per
Quindi se la f.o in base qualunque
f.o nella soluzione di base corrente la soluzione di base corrente è ottima. Se non vale il test di ottimalità si è costretti a cambiare vertice, passando ad un vertice adiacente. Cioè si passa a un’altra base
.
deve:
- essere adiacente (cioè differisce da
per una sola colonna); - migliorare la funzione obiettivo;
- essere tale che
è una soluzione ammissibile In termini di matrici si scambia una colonna
fuori base con una colonna di base. In termini di vettori entra in base
ed esce Criterio di Entrata
Criterio di Entrata
Entra in base una variabile con costo ridotto negativo.
Supponiamo che entri in base una variabile
, allora la f.o. diventa:
Dove
è il costo ridotto della variabile entrata. Se la variabile entra in base, questa passa da un valore zero (dato che era fuori base) ad un valore positivo. Le altre variabili fuori base restano sempre a zero. Però ha effetto sulle variabili di base:
Le componenti di base dunque diventano:
- Se tutti gli
sono , allora può aumentare senza limiti e le sono ancora ammissibili; - Se
aumenta all’infinito la f.o. va a , cioè:
Stabiliamo quindi il test di limitatezza:
Test di Limitatezza
Se c’è un costo ridotto
e gli elementi della colonna sono allora il problema non è limitato. Se non è valido il test di illimitatezza bisogna cambiare vertice. Occorre scegliere quale variabile fare uscire dalla base.
Riferendoci al sistema delle componenti di base definito prima, vogliamo che
Otteniamo dunque:
Che significa?
Tutto questo significa che
può crescere fino al raggiungere il minimo tra tutti i rapporti. O, in altre parole: Criterio di Uscita (del Rapporto)
Criterio di Uscita
Esce dalla base la variabile
dove è l’indice cui corrisponde il minimo dei rapporti. La funzione migliora del valore
, e la variabile entra con valore . Questo valore è infatti il valore additivo
, visto nel criterio di entrata. Schema del Metodo del Simplesso
Preparati, da qui in poi partono gli esempi grafici.
Innanzitutto, si considera la Forma Standard del problema:
- Si sceglie una base B (matrice
con Det. ), e si calcola la soluzione di base - Se i costi ridotti delle variabili fuori base sono
, la soluzione è ottima (Test di Ottimalità) - Se c’è un costo ridotto
, quindi negativo (per il criterio di entrata), e gli elementi della colonna della matrice sono , il problema non è limitato (Test di Illimitatezza) - Si calcola:
- e sia
raggiunto per (Criterio di uscita) - Si cambia base:
Cambio Base: Operazione Pivotale
Adottiamo la forma Tableau del metodo del simplesso:
Tableau simplesso
Soluzione Base Ammissibile (SAB) corrente:
- Se
entra la variabile , - Se il criterio di uscita ha indicato l’indice
, esce la variabile Dunque la colonna
entra nella matrice di Base al posto della colonna . L’elemento
si chiama o perno della trasformazione, e deve essere sempre . La colonna h-esima si trasforma nella colonna k-esima con le seguenti operazioni:
Operazioni di trasformazione colonna
- La riga
si divide per il perno (motivo della condizione ); - Alle altre righe si aggiunge un opportuno multiplo della riga
del perno modificata in modo da annullare tutti gli elementi Esempio in LateX
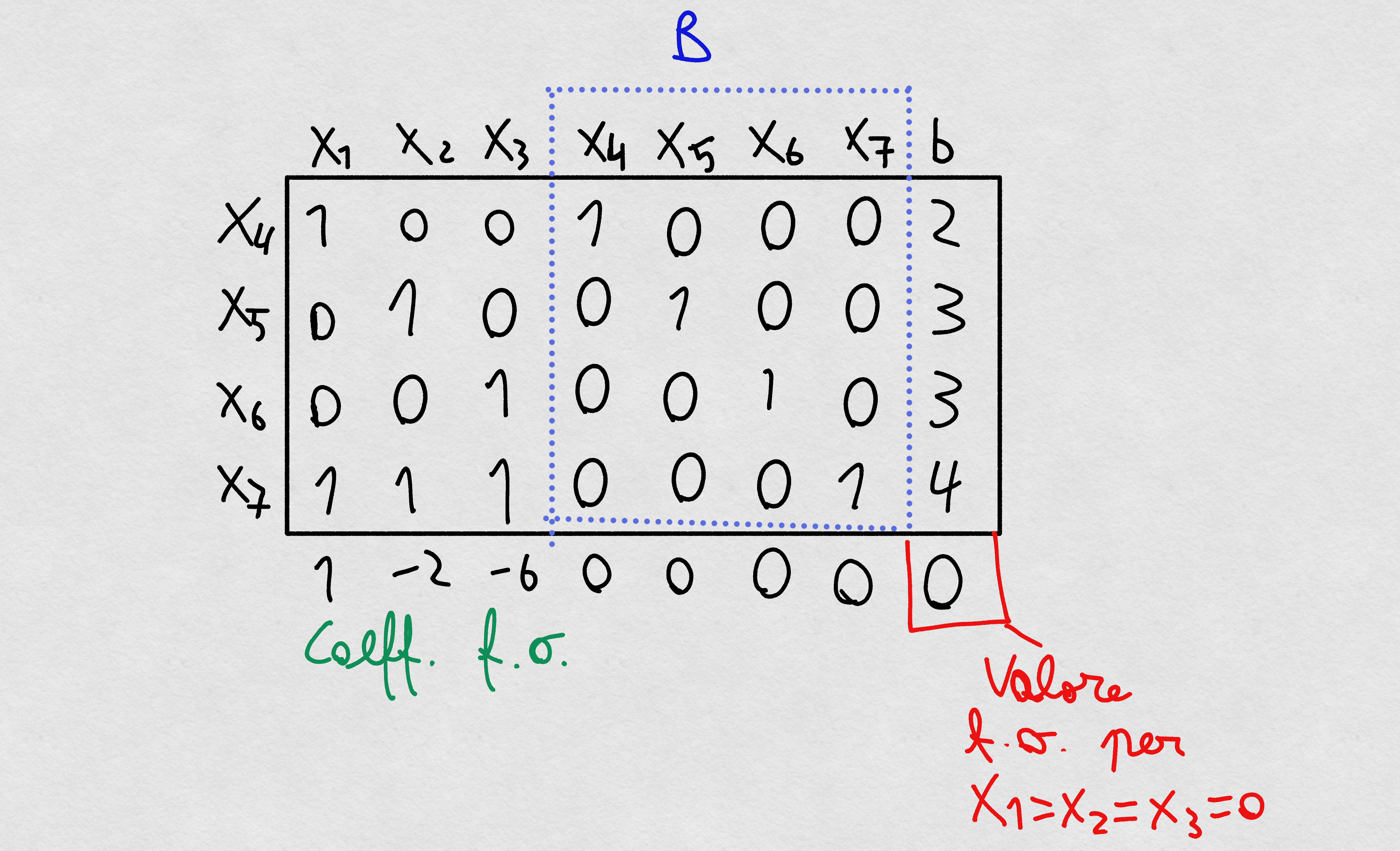
Si porta il problema in forma standard
Abbiamo aggiunto una base B con le variabili di scarto:
sono variabili di base, e la matrice B in questo caso è una matrice identità. Questo perché se i vincoli sono tutti
le variabili scarto diventano variabili di base.
La SAB Corrente sarà:
- Ricordiamo che
, in notazione vettoriale, dove vettore delle componenti in base, mentre sarebbe il vettore delle componenti fuori base - Se
le componenti di base della SAB sono i termini noti. Inoltre, se i vincoli sono tutti di tipo
i costi ridotti coincidono con i coefficienti delle variabili della f.o.
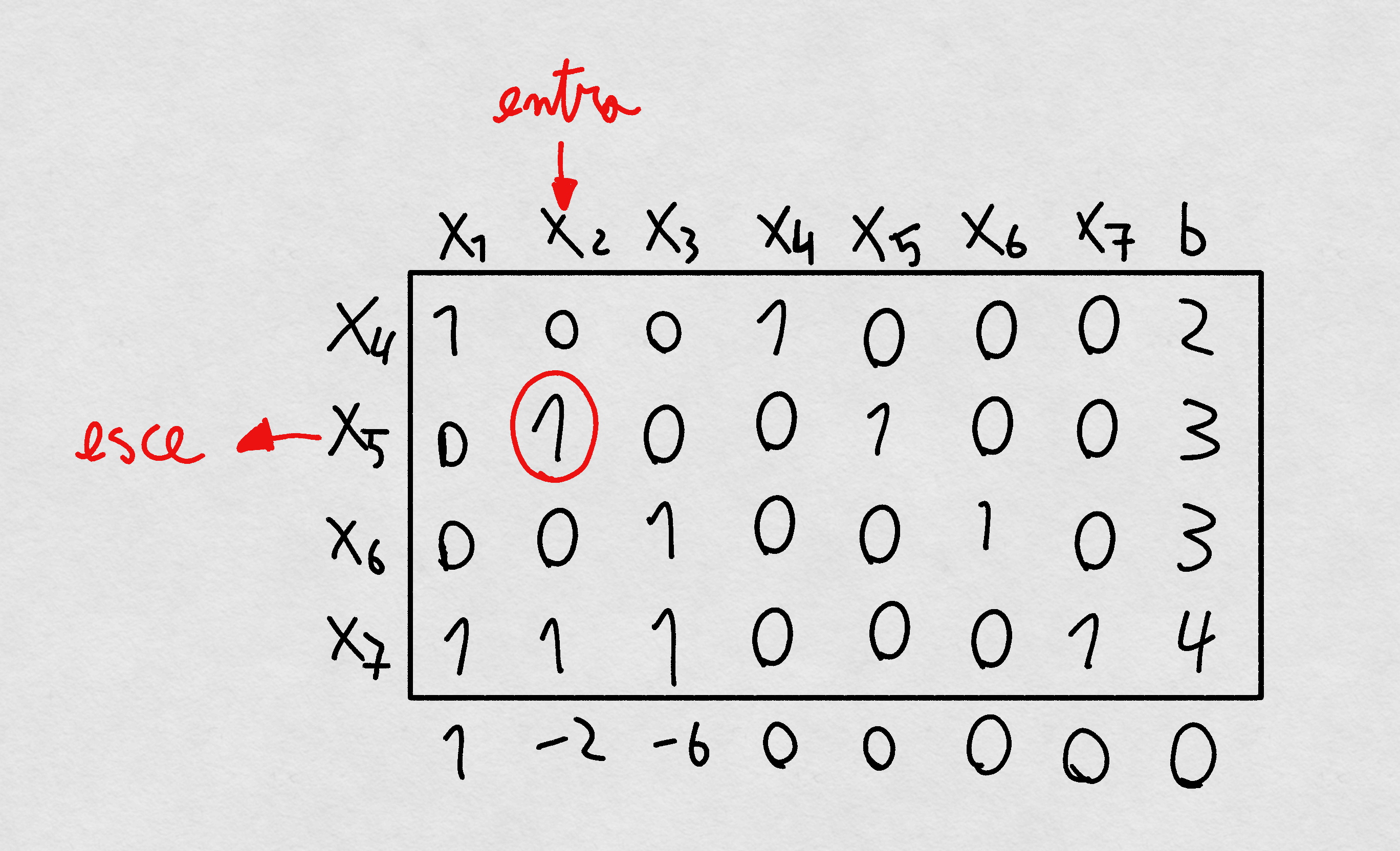
- Notiamo che ci sono 2 costi ridotti negativi. In questo caso, il criterio d’entrata sceglie quello con indice minore (cioè quello trovato prima). Questa scelta è definita dalla Regola di Bland.
- Per la variabile uscente, usiamo il criterio del rapporto. In questo caso calcoliamo:
- Il rapporto minimo è pertanto in corrispondenza della seconda riga, cioè della variabile
, la variabile uscente. - In sunto: Entra
, Esce , l’incrocio tra la colonna della variabile entrante e la riga di quella uscente
Operazioni sulle righe
La colonna 2 deve dividere la colonna 5.
Procedura
- Il perno vale 1, quindi non ci sono modifiche da fare.
- Se fosse
, bisognerebbe dividere tutta la riga del perno per il perno stesso. - Operiamo sull’ultima riga, generiamo una nuova riga
- Il costo ridotto della nuova variabile di base
deve fare zero: La nuova tabella, con relativa nuova SAB, sarà quindi:
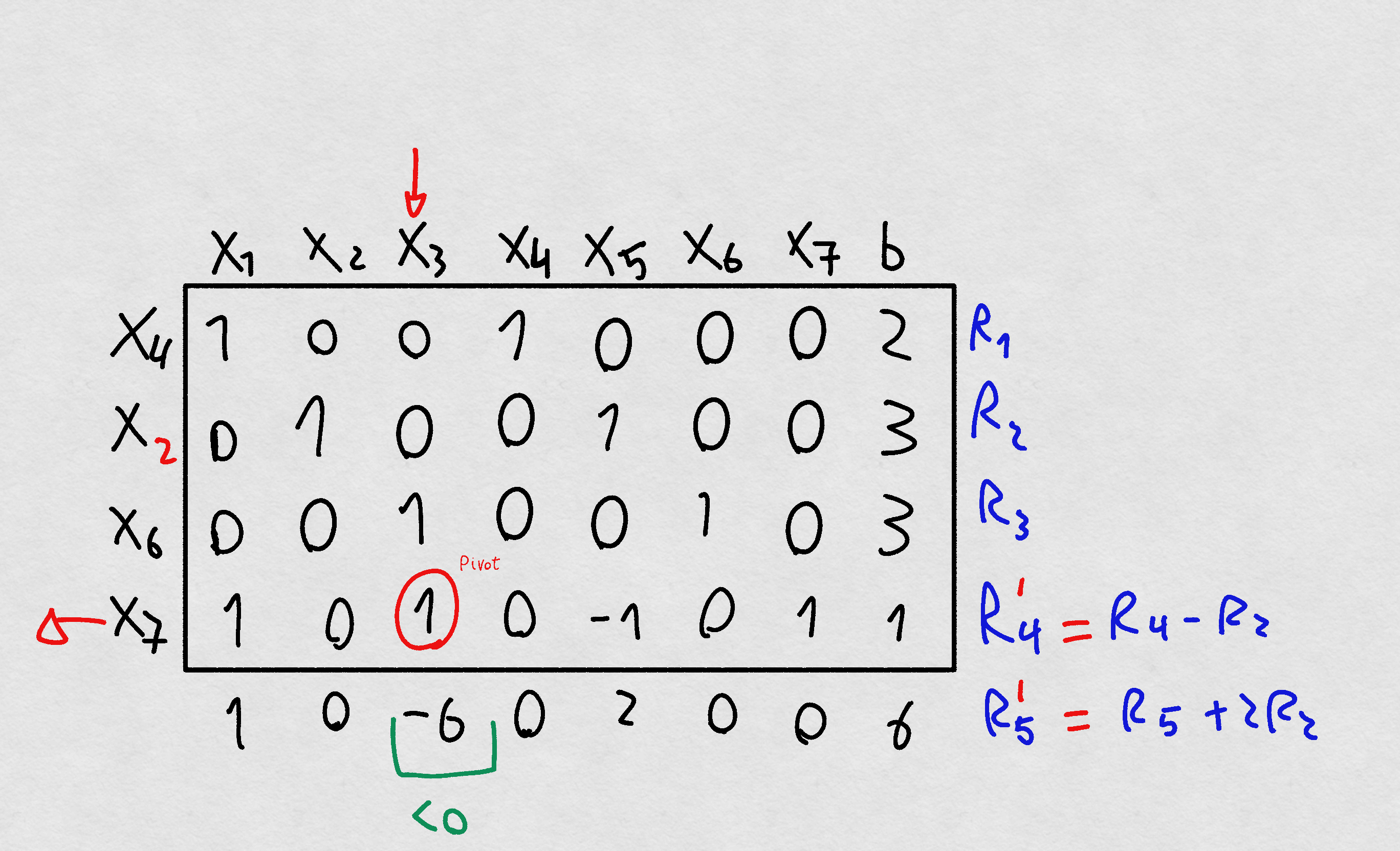
Dato che abbiamo ancora un costo ridotto negativo (
), si continua con l’algoritmo.
- Entra
, ed esce - Si hanno le seguenti trasformazioni:
Otteniamo un’altra tabella e nuova SAB:
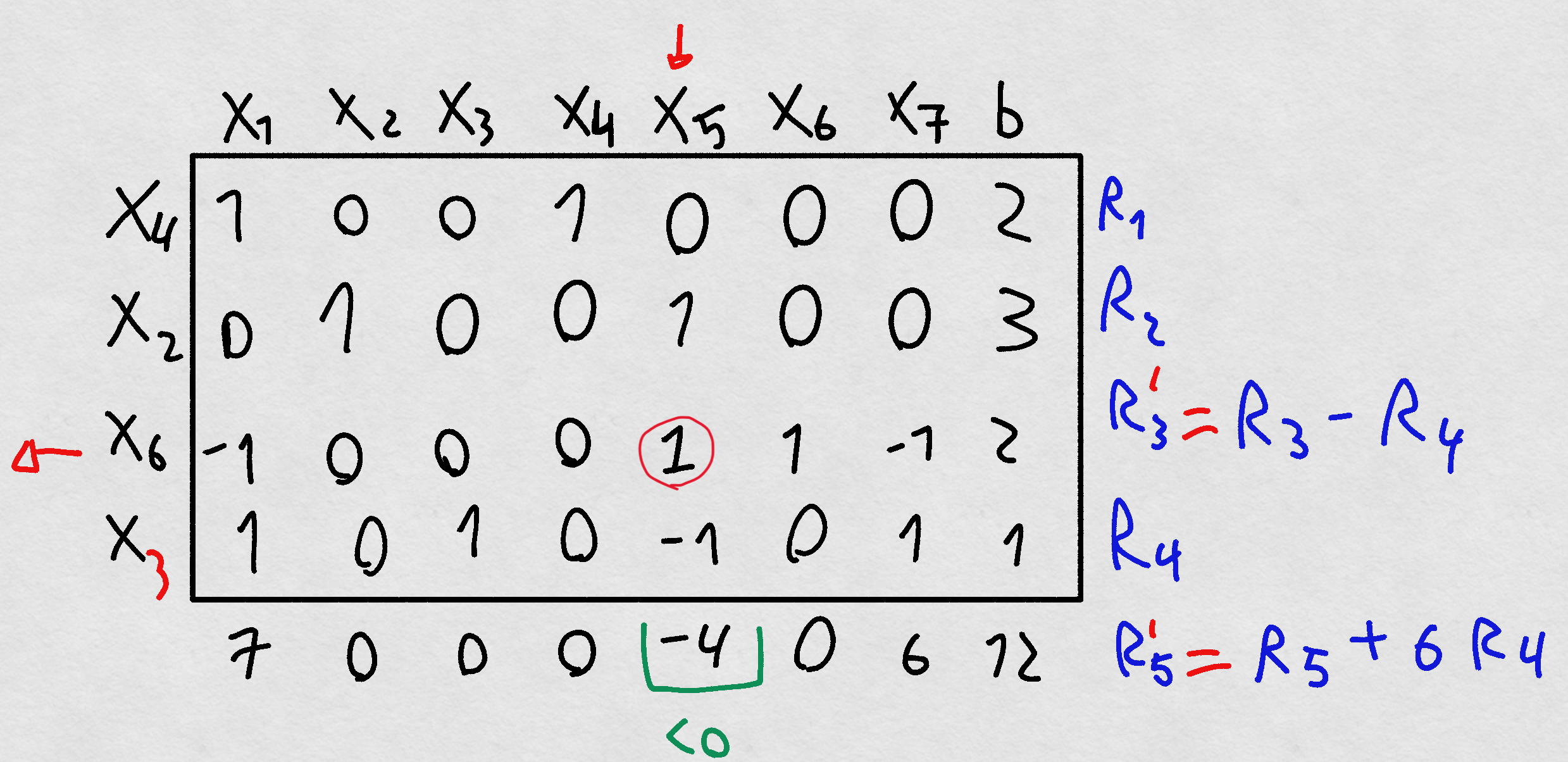
Purtroppo dai calcoli abbiamo un nuovo costo negativo in
, per cui:
- Entra
, ed esce , perché ha il rapporto minimo rispetto alla riga - E si hanno le seguenti trasformazioni:
- Reminder: finora non è stato necessario toccare la riga del pivot perché abbiamo avuto fortuna e tutti i pivot sono
, altrimenti avremmo dovuto dividere per il pivot. Otteniamo la tabella finale con SAB ottima:
- Questa è la tabella finale perché tutti i costi ridotti sono
, quindi ci fermiamo per il Test di Ottimalità. - Il valore ottimo della funzione obiettivo è dunque
. Questo conclude l’esempio.
- Nel caso in cui i costi ridotti siano tutti strettamente positivi (
), allora per Unicità della soluzione, la SAB corrente sarebbe l’unica soluzione ottima. Convergenza del Metodo
Continua in:
Link to original
Convergenza del Metodo
Convergenza del Metodo
Se nelle iterazioni del metodo si generano soluzioni di base non degenere (cioè con componenti di base
), allora la funzione obiettivo migliora ad ogni iterazione. Dopo un numero finito di iterazioni, il metodo si arresta. Se si incontrano delle soluzioni di base degeneri, allora può accadere di rimanere bloccati su un vertice.
Risulta che data una base B si costruisce una soluzione di base
. Una soluzione di base degenere (con componenti di base
) invece proviene da più basi. Se ci sono soluzioni di base degeneri non è garantito che sia senza ripetizioni. Cioè il metodo cicla, tornando su basi già visitate.
Riassumento
- Soluzioni di base non degenere
proviene da una sola base (e ha componenti di base ) - Soluzioni di base degenere
proviene da più basi (e ha componenti di base ) Regola di Bland
Si usa per evitare di ciclare.
Se c’è indecisione sulla variabile entrante, (cioè ci sono più costi ridotti negativi), oppure sulla variabile uscente (cioè ci sono più rapporti minimi uguali), si sceglie sempre l’indice minimo.
Complessità
, nel caso medio è lineare in o in . Il numero delle iterazioni è circa . Nel caso peggiore si ottiene un ipercubo di dimensione
, in cui occorre visitare tutti i vertici per trovare l’ottimo. Questo risulta in
iterazioni necessarie per arrivare al vertice ottimo. Unicità Soluzione
Se i costi ridotti delle variabili fuori base sono tutti strettamente positivi, allora la soluzione di base corrente è l’unica soluzione ottima.
Esempio 1
Vediamo direttamente la tabella finale.
Si potrebbe pensare di ‘forzare’ il metodo facendo entrare in base
, considerando il costo ridotto nullo. Ma gli elementi della colonna sono
e quindi questo significa che il problema ha soluzioni ottime. Generalmente risulta che sono ottimi […Scrittura incomprensibile… 😒] i punti della semiretta che ha origine nel vertice ottimo.
Esempio con Base Degenere
[Grafica WIP che non verrà mai fatta probably, lungo e poco utile da vedere]
Restiamo bloccati in un vertice.
In generale una soluzione di base degenere è una intersezione di
Link to originalvincoli dove è la dimensione del problema. Inoltre, di solito nei vertici vicini la f.o. avrà valore ‘meno ottimo’ rispetto al vertice di intersezione dove restiamo bloccati.
Metodo delle Due Fasi
Metodo delle Due Fasi
Quando si applica?
Il metodo delle due fasi si applica a problemi di PL con vincoli misti (
) nei quali non è possibile trovare come base la matrice identità. Se non c’è la matrice identità, è impossibile avviare il simplesso infatti.
Consiste, appunto, di due fasi:
- Determina una soluzione di base ammissibile e la forma canonica;
- Risolvi il problema di PL.
Nella fase 1 si risolve un problema detto Artificiale.
Consideriamo un problema di PL in Forma Standard che non ha la sottomatrice identità:
Aggiungiamo ad ogni vincolo una variabile
detta artificiale. Nella
fase si risolve il problema artificiale: Una soluzione del problema artificiale è del tipo:
Se
è soluzione di Base ammissibile del problema iniziale! Supponiamo di aver risolto il problema della
fase, per andare avanti con la teoria. Otterremmo:
=valore ottimo= A questo punto ci sono due casi:
vuol dire che qualche allora si conclude che il problema iniziale non ha soluzione ammissibile. La regione ammissibile del problema è dunque vuota. La soluzione finale della fase è tale che è una soluzione di base ammissibile per il problema iniziale. Quando si passa alla
fase si usa la tabella finale della fase e si ricalcolano i costi ridotti, perché si riprende la funzione obiettivo del problema iniziale. Ci sono 2 ulteriori sottocasi:
- Non ci sono variabili artificiali in base. Si cancellano nella tabella le colonne delle variabili artificiali, e si risolve il problema.
- Ci sono variabili artificiali in base. Restano in base anche nella fase 2, e si cerca di farle uscire dalla base con il metodo del simplesso. Se non si riesce, vuol dire che il vincolo associato alle variabili artificiali in base è ridondante, e si può eliminare.
Esempio
Fase 1
Consideriamo un problema con soli vincoli di uguaglianza, ma senza matrice identità.
(direttamente in forma standard perché mi secco a ricopiare)
Applichiamo la
fase: creiamo un problema artificiale sostituendo la funzione obiettivo, e aggiungendo le variabili artificiali (che si comportano come variabili scarto): Otteniamo la matrice:
Nota Bene
Se si usano le variabili artificiali in ogni riga i costi ridotti delle variabili fuori base sono dati dall’OPPOSTO della somma per colonna.
Calcoliamo i costi ridotti con la formula
, che tradotto dal matematichese significa:
- Costo Ridotto = Coeff. Variabili nella f.o. - coeff. variabili base f.o.
colonna corrente.
Per cui il valore corrente della f.o. è: -vettore coeff. variabili base nella f.o.
colonna termini noti: Entra in base
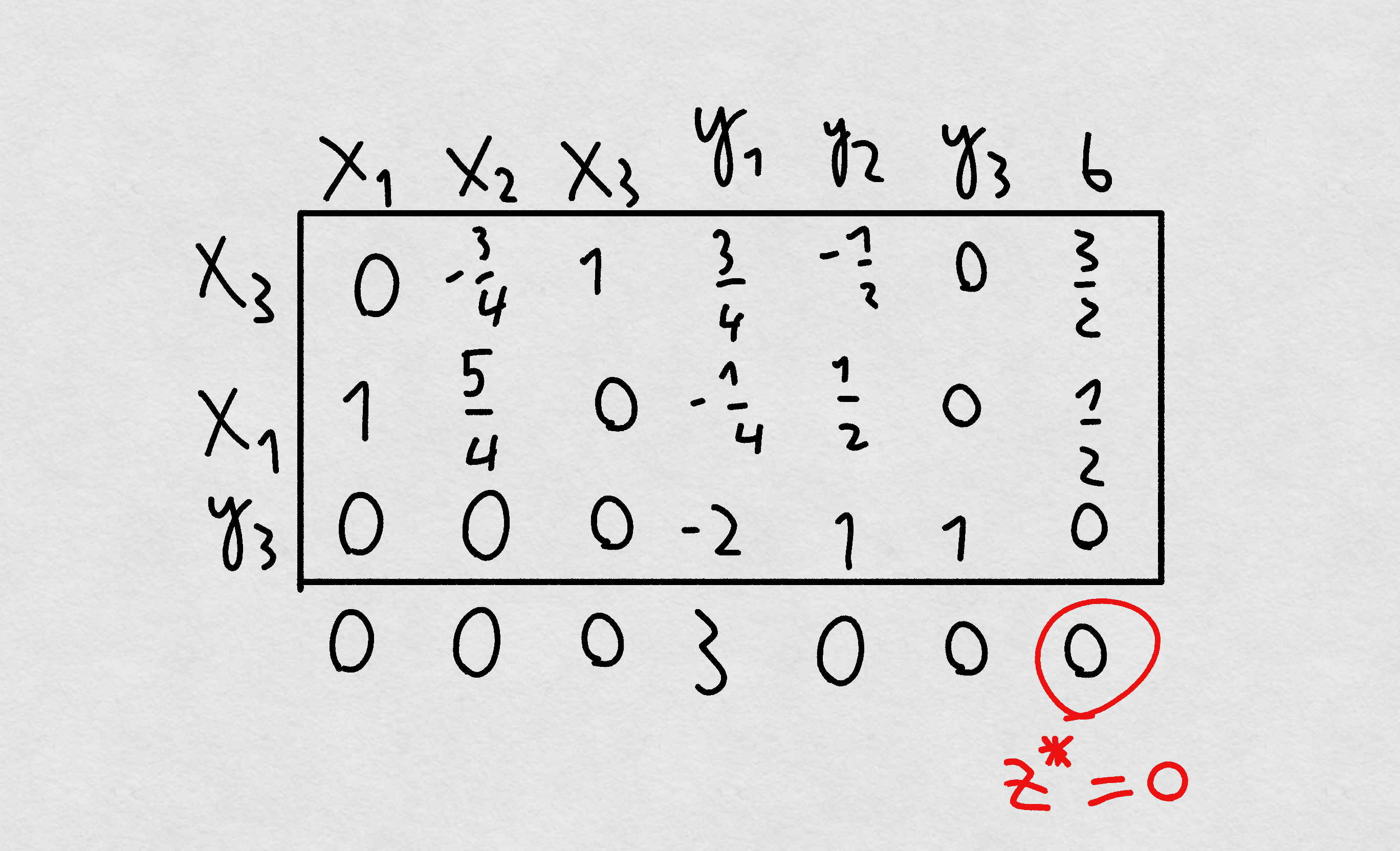
, esce . Dopo alcune iterazioni, otteniamo la tabella finale:
Dato che
, si può passare alla fase. Notiamo che la soluzione di base trovata in questo caso è:
, ed il vettore è una SAB ammissibile per il problema iniziale. Nota Bene
La prima fase si conclude in uno dei due sottocasi:
Problema iniziale inammissibile Fornisce una SAB Ammissibile per il problema iniziale (forma canonica per avviare la risoluzione del problema) Fase 2
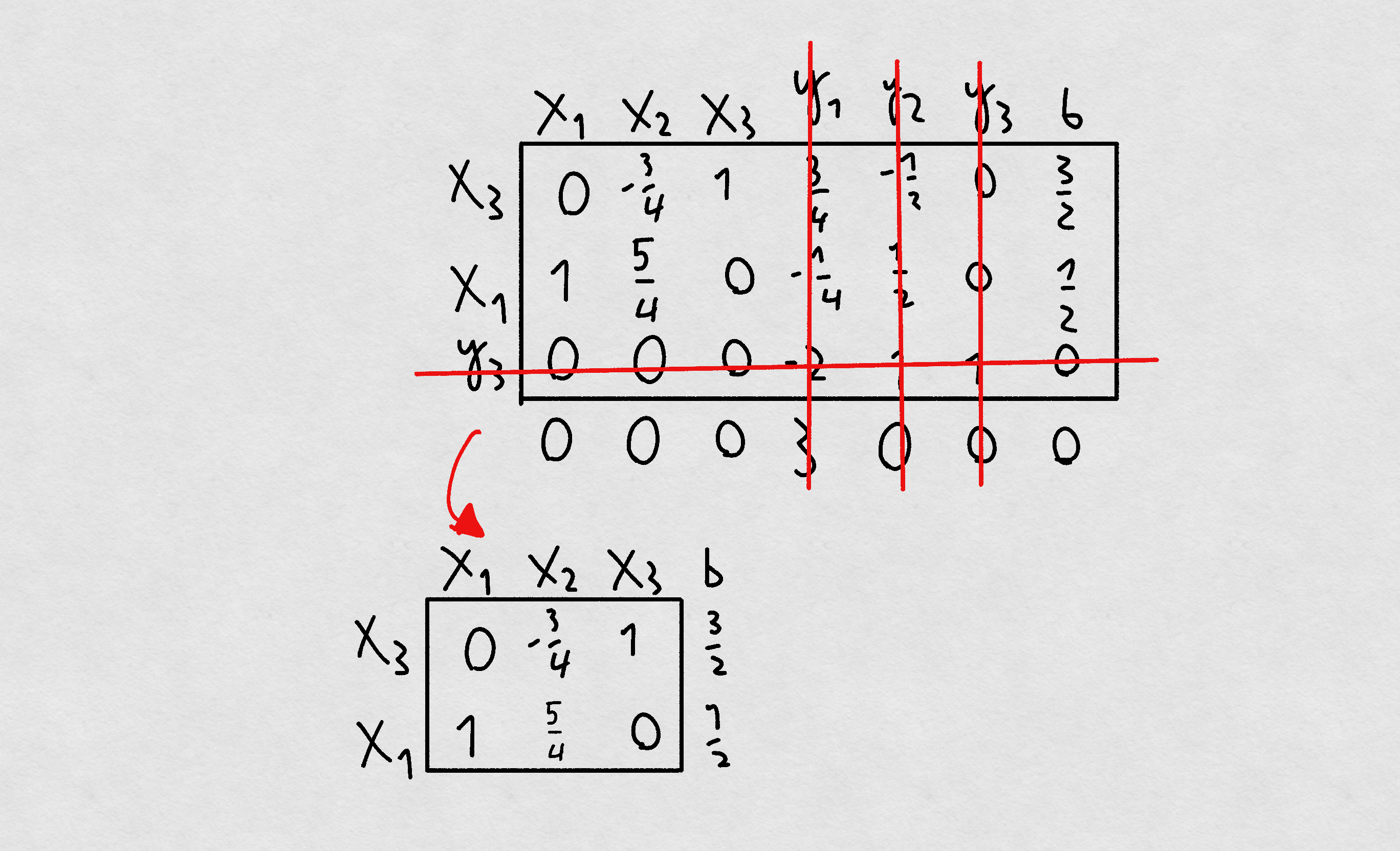
Questa fase risolve il problema iniziale partendo dalla soluzione di base ammissibile trovata alla fine della prima fase:
Notiamo che
non sono in base, e si può eliminare pure in quanto vincolo ridondante (sia colonna che riga) (è ridondante perché l’equazione che rappresenta la riga equivale a 0)
Ottenuta questa tabella si riprende la funzione obiettivo originale:
I valori dei costi ridotti e della funzione obiettivo sono a questo punto:
Vettore
0 0 Dopo altri svariati calcoli e un’altra iterazione, arriviamo alla SAB ottima:
, con valore ottimo Fin 💖
Link to original

Dualità
Dualità
La teoria della dualità permette di:
- Introdurre nuovi metodi risolutivi;
- Effettuare analisi di problemi di ottimalità
Dato un problema di PL detto PRIMALE, si associa ad esso un altro problema di PL detto primale:
La conversione avviene secondo le regole stabilite dalla:
Tabella Primale Duale
Link to original
Primale Duale min max num. variabili num. vincoli num. vincoli num. variabili coeff f.o. termini noti termini noti coeff f.o. i-esimo vincolo i-esimo vincolo i-esimo vincolo libera j-esimo vincolo j-esimo vincolo libera j-esimo vincolo NB: Il Duale del Duale coincide col Primale Esempio
Problemi duali
Una coppia di problemi duali si dice simmetrica se è del tipo:
Se il primale è in Forma Standard si hanno problemi asimmetrici.
Relazioni Problemi Primali-Duali
Teorema della Dualità debole
Siano dati i problemi:
E sia
ammissibile per (P) e ammissibile per (D). Allora
Significato:
Teorema della Dualità debole
- La funzione obiettivo primale è un upper bound per il valore ottimo duale;
- La funzione obiettivo duale è un lower bound per il valore ottimo primale;
Corollario 1
Se
è ammissibile per (P) e ammissibile per (D) e allora è ottimo per (P), e è ottimo per (D) Corollario 2: Relazione Illimitato ←> Inammissibile
- Se (P) è illimitato
(D) è inammissibile; - Se (D) è illimitato
(D) è inammissibile. Riassunto dei possibili casi in una tabella:
Primale\Duale Ottimo Finito Illimitato Inammissibile Ottimo Finito Illimitato Inammissibile Teorema della Dualità Forte
Teorema della dualità forte
Se uno dei due problemi primale o duale ha ottimo finito allora anche l’altro ha ottimo finito, e i valori ottimi delle funzioni obiettivo coincidono. Se uno dei due problemi è illimitato, l’altro è inammissibile.
Relazione Ottimalità Primale < - > Ammissibilità Duale
Leggi dopo aver letto:
Scarti Complementari
Scarti Complementari
Scarti Complementari
Siano dati i problemi primale-duale:
Siano
ammissibile per (P) e ammissibile per (D).
sono soluzioni ottime soddisfano le condizioni:
relazioni relazioni Abbiamo un sistema di
equazioni. Condizioni di ottimalità (nella dualità)
- Ammissibilità Primale
Vincoli Primali - Ammissibiltà Duale
Vincoli Duali Oppure,
sono ottimi valgono:
e anche:
Che significa tutto questo, e soprattutto a che serve? Capiamolo con degli esempi.
(Se stai pensando di skipparlo: è capitato non solo alle prove in itinere, ma anche durante gli orali.)
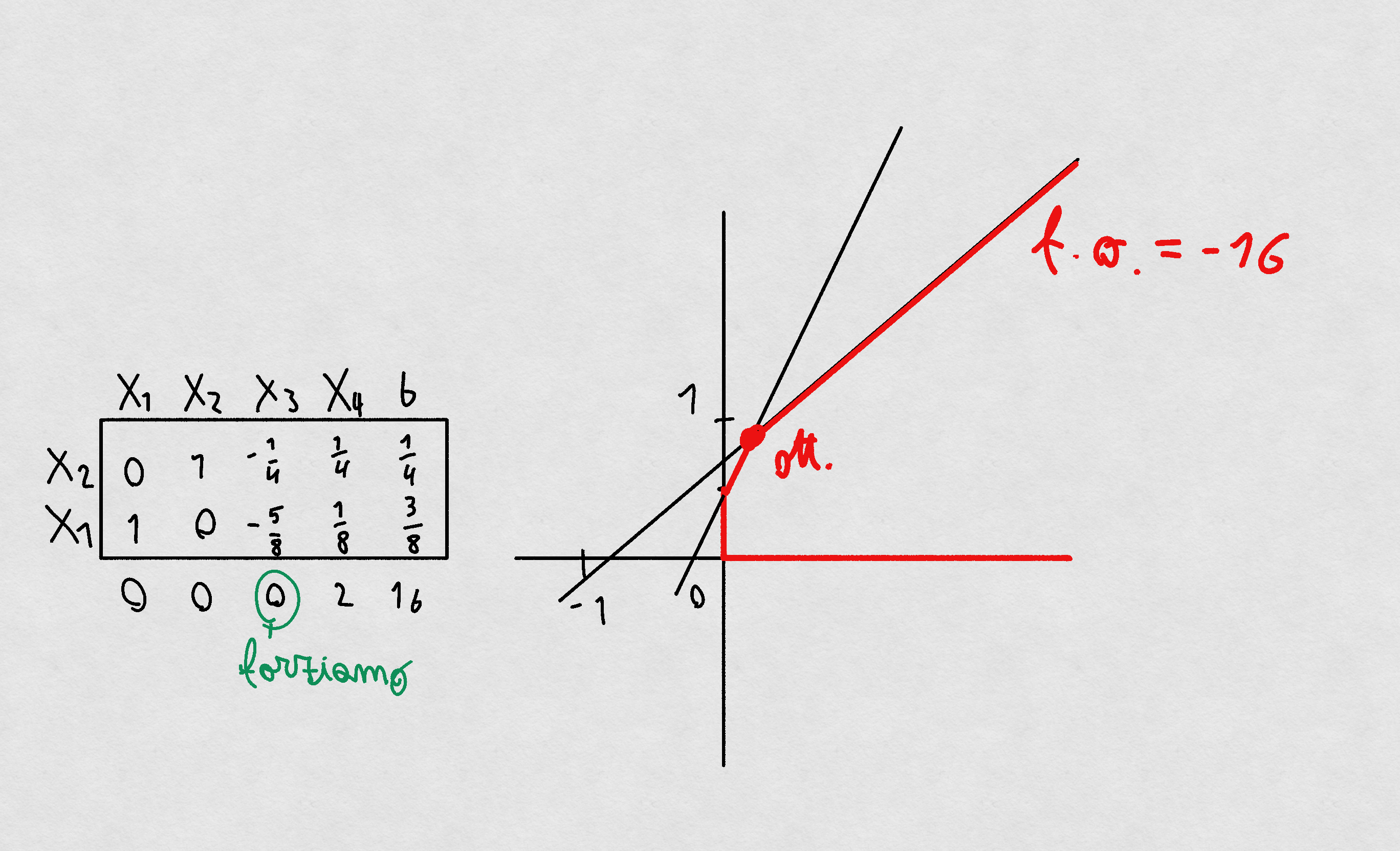
Esempio
Esempio (Scarti Complementari):
Un utilizzo degli scarti complementari è di calcolare la soluzione ottima duale, data la soluzione ottima primale (0,6).
Potremmo arrivarci con il simplesso o con qualsiasi altro metodo, ma l’idea è quella di evitare di impostare l’algoritmo
Dato il problema Primale con soluzione (0,6):
Scriviamo il problema duale:
A questo punto creiamo il sistema di scarti complementari:
Abbiamo:
con 3 equazioni in y, =0 con 2 equazioni in x. Dobbiamo vedere quali equazioni ci danno ‘informazioni’ sulla soluzione duale.
Dato che abbiamo la SOLUZIONE PRIMALE, sostituiamo
Questo si traduce in:
Troviamo la soluzione duale:
. Perciò data la funzione obiettivo duale:
, avremo l’ottimo
Non è garantito avere un sistema così pulito. Ad esempio, nella prova in itinere dell’A.A. 2023/24 è capitato un sistema molto più complesso dove l’informazione su una variabile
Link to originalandava presa facendo coincidere la con la . Non molto divertente. Sia
la soluzione ottima primale e la soluzione ottima duale. Risulta
, cioè coincidono i valori ottimi.
deve soddisfare i vincoli duali, cioè: Sostituendo
con otteniamo la dimostrazione, e arriviamo al risultato che , che è la condizione di ottimalità primale. Per cui la Ottimalità Primale COINCIDE con l’Ammissibilità Duale (importantissimo per Simplesso Duale).
Calcolo Soluzione Duale
Possiamo usare:
- Scarti Complementari;
- Tabella simplesso del problema primale.
Se il problema primale ha vincolo
si utilizzano le variabili scarto per la Forma Standard. La soluzione ottima si ottiene:
, dove:
vettore coefficienti della f.o. associati alle variabili in base alla iterazione; vettore dei costi ridotti nella tabella finale del simplesso associati alle variabili in base alla iterazione. Esempio Veloce
Dato un problema del tipo:
Eseguendo il metodo del simplesso otterremo la soluzione ottima primale:
con e valore ottimo e costi ridotti finali:
Calcolando la soluzione duale con la formula definita subito sopra l’esempio abbiamo:
, che è la soluzione ottima duale. Osservazione
Se il problema primale ha vincoli
la soluzione ottima duale sarà la sottrazione inversa rispetto a quella appena eseguita, cioè: Link to originalSimplesso Duale
Si tratta di un metodo per risolvere il problema di PL primale nel caso in cui non sia valida l’ammissibilità primale (cioè ci sono termini noti negativi nella Forma Standard), ma sia verificata l’ammissibilità duale (cioè i costi ridotti delle variabili fuori base sono
). Il metodo parte da una soluzione di base non ammissibile, cioè esterna al poliedro, e cerca di raggiungere la soluzione ottima.
Ad ogni iterazione i costi ridotti sono sempre
e si cerca di avere tutti i termini noti Per riassumere:
Simplesso Primale Simplesso Duale Condizioni: Termini Noti Condizioni: C’è almeno un termine noto negativo; Costi ridotti Obiettivo: Costi Ridotti Obiettivo: Termini Noti Criterio di Uscita
Esce dalla base la variabile
associata al termine noto negativo Si individua la riga
, se gli elementi della riga sono TUTTI PROBLEMA PRIMALE INAMMISSIBILE Criterio di non ammissibilità
Se il primale è inammissibile
il duale potrebbe essere non limitato o non ammissibile. Poichè vale la condizione di ammissibilità duale allora il problema duale non è limitato
Se ci sono elementi negativi sulla riga
si individua la variabile uscente , dove è l’indice di colonna tale che
Criterio di Entrata
Resta individuato il pivot
della trasformazione. Riassumendo di nuovo:
Simplesso Primale Simplesso Duale Costo ridotto dà la variabile entrante Termine noto dà la variabile uscente Criterio Rapporto per la variabile uscente Criterio rapporto per la variabile entrante Criterio illimitatezza:
Elementi colonnacon costo ridotto negativo Criterio di inammissibilità:
Elementi rigaassociati ad un termine noto Ottimalità:
Costi ridottiOttimalità:
Termini notiAnalisi di Post-Ottimalità
Supponiamo di causare la perturbazione di un termine noto
La soluzione di ottima di base è
, Sia
(B^{-1}b,0)è ancora ottima?Caso 1:
ha componenti negative Non vale l’ammissibilità primale. I costi ridotti
non hanno il vettore , quindi i costi ridotti sono ancora (e sono
perché è soluzione ottima). Possiamo applicare il simplesso duale per calcolare la nuova soluzione ottima.
Caso 2:
Link to originalha componenti è ammissibile
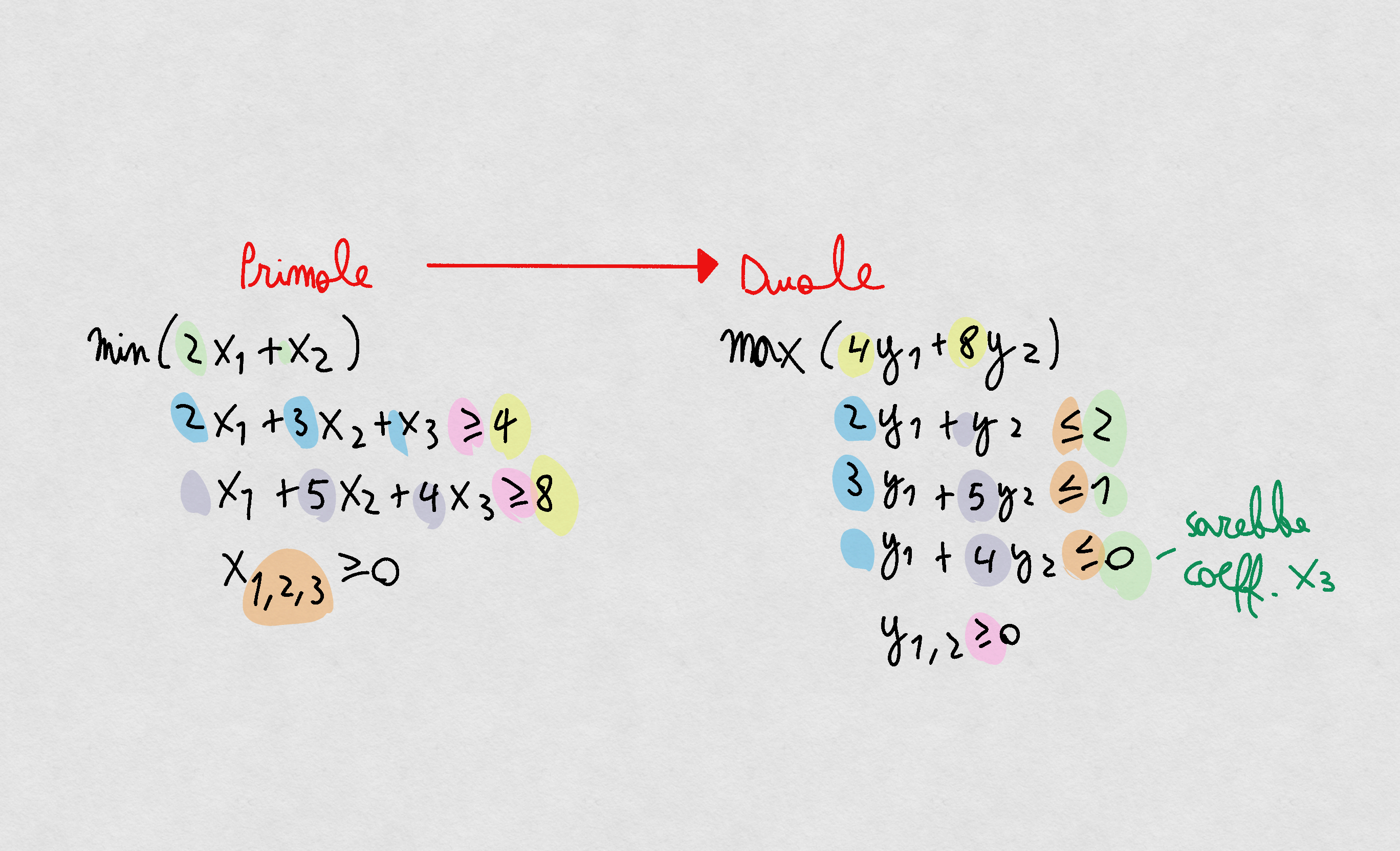
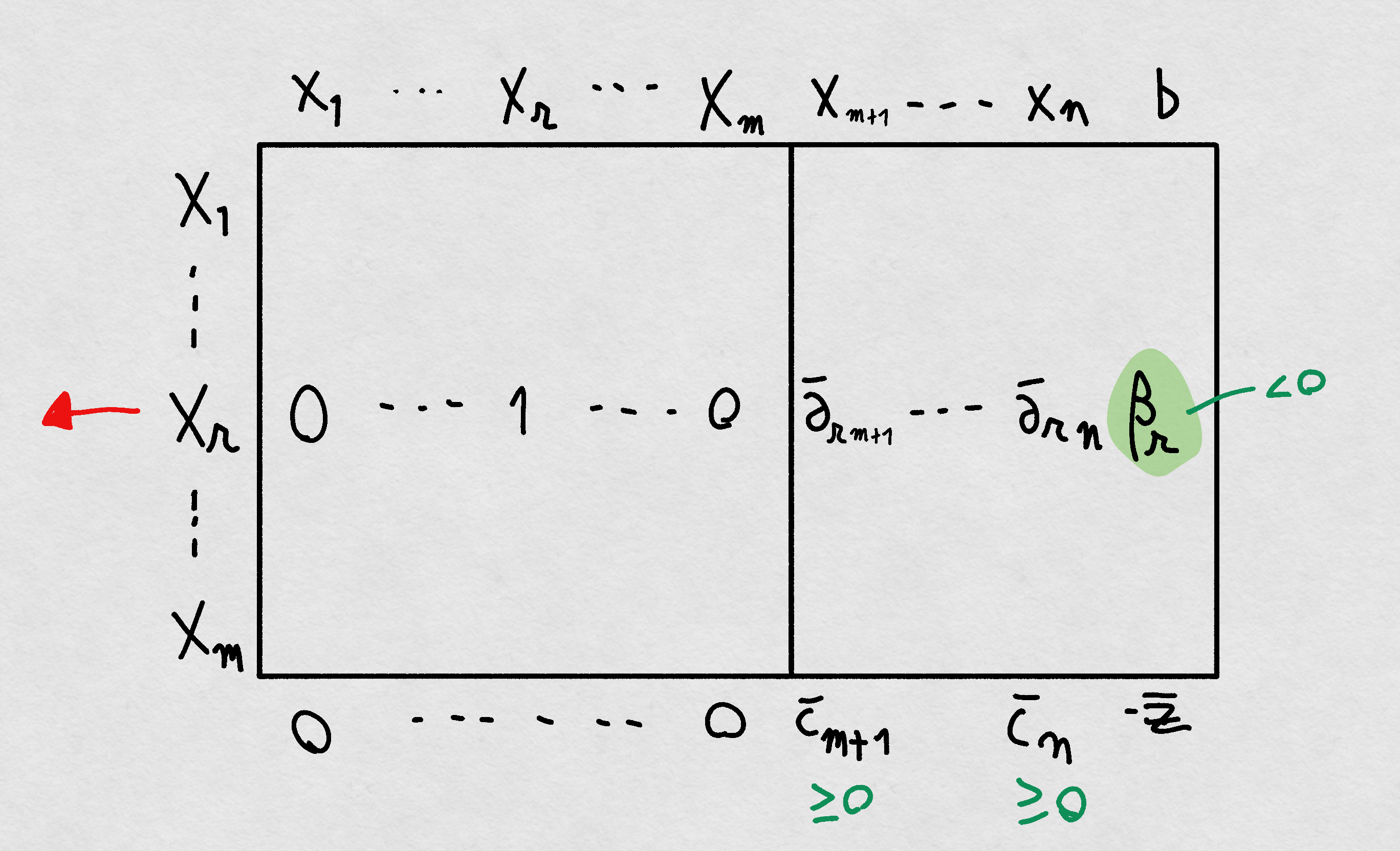
Tabella Primale Duale
Link to original
Primale Duale min max num. variabili num. vincoli num. vincoli num. variabili coeff f.o. termini noti termini noti coeff f.o. i-esimo vincolo i-esimo vincolo i-esimo vincolo libera j-esimo vincolo j-esimo vincolo libera j-esimo vincolo NB: Il Duale del Duale coincide col Primale
Scarti Complementari
Scarti Complementari
Siano dati i problemi primale-duale:
Siano
ammissibile per (P) e ammissibile per (D).
sono soluzioni ottime soddisfano le condizioni:
relazioni relazioni Abbiamo un sistema di
equazioni. Condizioni di ottimalità (nella dualità)
- Ammissibilità Primale
Vincoli Primali - Ammissibiltà Duale
Vincoli Duali Oppure,
sono ottimi valgono:
e anche:
Che significa tutto questo, e soprattutto a che serve? Capiamolo con degli esempi.
(Se stai pensando di skipparlo: è capitato non solo alle prove in itinere, ma anche durante gli orali.)
Esempio
Esempio (Scarti Complementari):
Un utilizzo degli scarti complementari è di calcolare la soluzione ottima duale, data la soluzione ottima primale (0,6).
Potremmo arrivarci con il simplesso o con qualsiasi altro metodo, ma l’idea è quella di evitare di impostare l’algoritmo
Dato il problema Primale con soluzione (0,6):
Scriviamo il problema duale:
A questo punto creiamo il sistema di scarti complementari:
Abbiamo:
con 3 equazioni in y, =0 con 2 equazioni in x. Dobbiamo vedere quali equazioni ci danno ‘informazioni’ sulla soluzione duale.
Dato che abbiamo la SOLUZIONE PRIMALE, sostituiamo
Questo si traduce in:
Troviamo la soluzione duale:
. Perciò data la funzione obiettivo duale:
, avremo l’ottimo
Non è garantito avere un sistema così pulito. Ad esempio, nella prova in itinere dell’A.A. 2023/24 è capitato un sistema molto più complesso dove l’informazione su una variabile
Link to originalandava presa facendo coincidere la con la . Non molto divertente.
Simplesso Duale
Si tratta di un metodo per risolvere il problema di PL primale nel caso in cui non sia valida l’ammissibilità primale (cioè ci sono termini noti negativi nella Forma Standard), ma sia verificata l’ammissibilità duale (cioè i costi ridotti delle variabili fuori base sono
). Il metodo parte da una soluzione di base non ammissibile, cioè esterna al poliedro, e cerca di raggiungere la soluzione ottima.
Ad ogni iterazione i costi ridotti sono sempre
e si cerca di avere tutti i termini noti Per riassumere:
Simplesso Primale Simplesso Duale Condizioni: Termini Noti Condizioni: C’è almeno un termine noto negativo; Costi ridotti Obiettivo: Costi Ridotti Obiettivo: Termini Noti Criterio di Uscita
Esce dalla base la variabile
associata al termine noto negativo Si individua la riga
, se gli elementi della riga sono TUTTI PROBLEMA PRIMALE INAMMISSIBILE Criterio di non ammissibilità
Se il primale è inammissibile
il duale potrebbe essere non limitato o non ammissibile. Poichè vale la condizione di ammissibilità duale allora il problema duale non è limitato
Se ci sono elementi negativi sulla riga
si individua la variabile uscente , dove è l’indice di colonna tale che
Criterio di Entrata
Resta individuato il pivot
della trasformazione. Riassumendo di nuovo:
Simplesso Primale Simplesso Duale Costo ridotto dà la variabile entrante Termine noto dà la variabile uscente Criterio Rapporto per la variabile uscente Criterio rapporto per la variabile entrante Criterio illimitatezza:
Elementi colonnacon costo ridotto negativo Criterio di inammissibilità:
Elementi rigaassociati ad un termine noto Ottimalità:
Costi ridottiOttimalità:
Termini notiAnalisi di Post-Ottimalità
Supponiamo di causare la perturbazione di un termine noto
La soluzione di ottima di base è
, Sia
(B^{-1}b,0)è ancora ottima?Caso 1:
ha componenti negative Non vale l’ammissibilità primale. I costi ridotti
non hanno il vettore , quindi i costi ridotti sono ancora (e sono
perché è soluzione ottima). Possiamo applicare il simplesso duale per calcolare la nuova soluzione ottima.
Caso 2:
Link to originalha componenti è ammissibile
Programmazione Lineare Intera
Problemi di Ottimizzazione Lineare Intera
Programmazione Lineare Intera
Consideriamo problemi del tipo:
Problema PLI
Osservazione
Osservazione
La regione ammissibile di un problema intero non è convessa. In generale possono esservi alcune variabili continue e alcune intere. Si parla in tal caso di PLI mista (che non trattiamo)
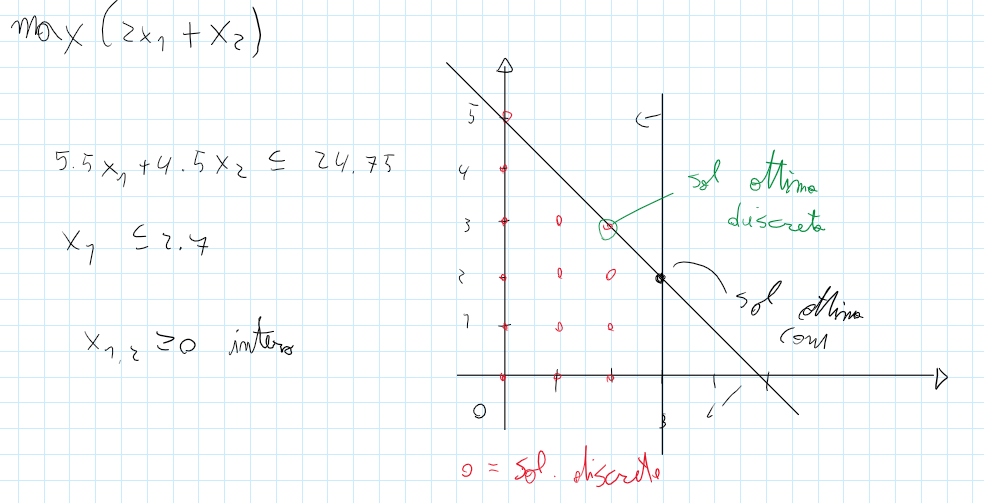
Esempio
Esempio Grafico PLI
Se risolviamo il problema senza vincolo di interezza, l’ottimo sarebbe
. Altrimenti:
- Soluzione ottima intera:
- Soluzione arrotondata:
Come è ovvio vedere, non è possibile risolvere il problema intero eliminando il vincolo di interezza e risolvendo il problema continuo approssimando la soluzione.
Bisogna necessariamente risolvere il problema intero.
Relazioni problemi lineari < - > interi
Rilassamento Lineare
Dato un problema PLI (definito sopra), è possibile ottenere un Rilassamento Lineare (RL), o continuo:
Risulta che
, cioè la regione ammissibile del problema di PLI è data dalla soluzione intera del poliedro P. Inoltre
, cioè la reigone ammissibile del problema PLI è sempre contenuta nel poliedro P. Si ha che il valore ottimo di (RL) è sempre
del valore ottimo di (PLI):
Infine:
Se la soluzione ottima di (RL) è intera
è soluzione del problema (PLI). Involucro Convesso
Dato un insieme discreto, esistono diversi poliedro che lo contengono. Il poliedro più interessante è l’Involucro Convesso (Convex Hull), e cioè il più piccolo insieme convesso che contiene i punti discreti.
L’involucro convesso ha solo vertici interi, si potrebbe quindi risolvere il problema continuo usando l’involucro convesso come insieme dei vincoli:
Il problema da risolvere è detto Rilassamento Convessificato e si ottiene la soluzione intera cercata.
In generale però, non è facile costruire
. Servono dei metodi per costruirlo. Metodo dei piani di taglio (Generico)
Metodo dei piani di taglio
Consideriamo il problema intero di prima:
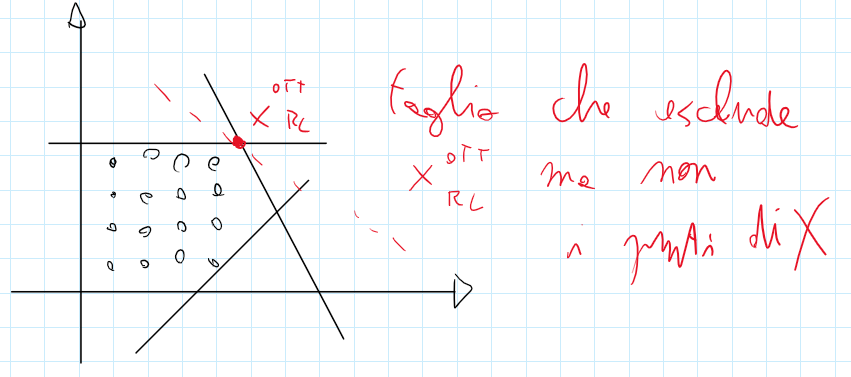
Taglio
Sia
una disuguaglianza verificata , essa si chiama Taglio se non è verificata dalla soluzione ottima del (RL)
Gli algoritmi dei piani di taglio risolvono una successione di problemi continui, ottenuti aggiungendo ogni volta un taglio, fino ad ottenre una soluzione intera.
Schema Generale:
- Si risolve il (RL), se
è intera - Si genera un taglio (nuovo vincolo!)
- Tale che
- Significa: Il taglio è verificato da tutti i punti interi, ma non è soddisfatto dall’ottimo del rilassamento continuo.
- Si risolve il nuovo problema continuo con l’aggiunta del nuovo vincolo
Procedimento ed Efficienza
È un processo molto lungo ed estenuante da fare a mano, per questo in teoria esistono i computer, che possono operare più tagli contemporaneamente per migliorare l’efficienza, ma noi siamo studenti universitari e quindi abbiamo meno diritti delle macchine.
A seconda della scelta del taglio si hanno diversi algoritmi, ma resta comunque l’idea comune di fondo di approssimare l’involucro convesso mediante l’inserimento dei tagli.
Implementazioni:
Una implementazione è il Metodo dei Tagli di Gomory.
Link to originalLink to originalMetodo di Gomory (Implementazione piani di taglio)
Metodo dei Tagli di Gomory
Schema Generale:
- Si risolve il (RL), se
è intera - Si genera un taglio (nuovo vincolo!)
- Tale che
- Significa: Il taglio è verificato da tutti i punti interi, ma non è soddisfatto dall’ottimo del rilassamento continuo.
- Si risolve il nuovo problema continuo con l’aggiunta del nuovo vincolo
Procedimento ed Efficienza
È un processo molto lungo ed estenuante da fare a mano, per questo in teoria esistono i computer, che possono operare più tagli contemporaneamente per migliorare l’efficienza, ma noi siamo studenti universitari e quindi abbiamo meno diritti delle macchine.
A seconda della scelta del taglio si hanno diversi algoritmi, ma resta comunque l’idea comune di fondo di approssimare l’involucro convesso mediante l’inserimento dei tagli.
Link to originalMetodo di Gomory
Genera il taglio sfruttando la tabella finale del Simplesso del Rilassamento Lineare (RL).
In particolare, usa la riga della tabella associata ad una componente frazionaria della soluzione ottima del (RL).
Sia data la tabella finale della risoluzione del RL:
— WIP
è frazionario.
non è intero, supponiamo che non sia intero. Procedimento
Scriviamo la riga
esima:
e consideriamo i floor dei coefficienti:
Questo è il taglio di Gomory in forma intera.
Il taglio va aggiunto al rilassamento lineare dopo averlo reso standard. Si aggiunge il vincolo standard:
Come precedentemente detto, la convergenza è lenta. I primi tagli risultano più efficaci, ma lo sono meno continuando ad iterare l’algoritmo.
Se si opera un taglio alla volta e ci sono più valori frazionari si sceglie sempre la riga con indice minore, oppure quella con termine noto che ha la parte frazionaria maggiore.
Link to originalEsempio (Grafico, lungo)
EH, VOLEVI! wip.
Problema del trasporto
Link to original
Problema dell'assegnamento
Siano A e B due insiemi tali che
e . Sono dati dei costi agli abbinamenti tra gli elementi di
e . Il problema degli assegnamenti consiste nell’assegnare ad ogni elemento di A un solo elemento di
in modo che non ci siano elementi non accoppiati e il costo totale sia minimo. Se
si aggiungono elementi fittizi e costi nulli degli abbinamenti con elementi fittizi. Formulazione Matematica
È un particolare problema del trasporto con domanda e offerta = 1.
La matrice dei coefficienti è Totalmente Unimodulare
Matrice Unimodulare
Matrice Unimodulare
Una matrice
si dice totalmente unimodulare quando ogni sottomatrice di ordine ha determinante Proposizione
Dato il poliedro
con A matrice tot. unimodulare, e b intero poliedro ha solo vertici interi Possiamo quindi risolvere il problema rilassato con il vincolo
(insieme agli altri vincoli diventa poi solo) ) Non è utile usare il simplesso perché il poliedro ha vertici fortemente degeneri, si usa infatti un algoritmo specifico:
Algoritmo Ungherese
Opera sulla matrice dei costi
e trasforma la matrice dei costi in una serie di matrici equivalenti fino a determinare l’assegnamento di costo minimo che corrisponderà al ricoprimento degli zeri della matrice. Operazioni
- Si sottrae ad ogni riga il suo elemento minimo:
(generiamo zeri sulle righe) - Si sottrae ad ogni colonna il suo elemento minimo:
(generiamo zeri su colonne) - Si cerca l’assegnamento di costo minimo, cercando il ricoprimento degli zeri della matrice. Se il numero di righe e colonne che ricoprono gli zeri è minore del numero di righe della matrice, l’assegnamento non è completo e si deve ridurre ancora la matrice. Altrimenti, si è trovato l’assegnamento completo di costo minimo
- Si barrano le righe e le colonne che ricoprono gli zeri. Sia
l’elemento minimo non barrato. Si aggiunge agli elementi barrati 2 volte (cioè l’incrocio tra riga e colonna) e si sottrae agli elementi non barrati. Si ripetono
e fino a trovare l’assegnamento completo Regola generale per trovare il ricoprimento minimo degli zeri
Link to original
- Si etichettano le righe lasciate fuori dall’assegnamento;
- Si etichettano le colonne che hanno degli zeri in corrispondenza delle righe etichettate;
- Si etichettano le righe abbinate alle colonne etichettate dall’assegnamento ottenuto;
- Si barrano le righe non etichettate e le colonne etichettate.
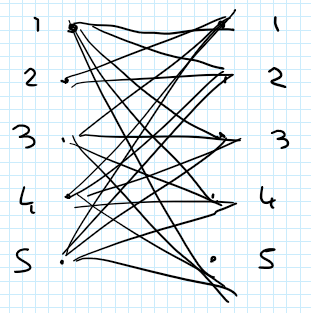
Assegnamento su Grafo Bipartito
Il problema dell’assegnamento si può vedere su un grafo bipartito completo. Siano noti i costi
su tutti gl iarchi e si cerca un abbinamento tra gli elementi dei due insiemi di costo minimo. Link to original
Metodo dei piani di taglio
Consideriamo il problema intero di prima:
Taglio
Sia
una disuguaglianza verificata , essa si chiama Taglio se non è verificata dalla soluzione ottima del (RL)
Gli algoritmi dei piani di taglio risolvono una successione di problemi continui, ottenuti aggiungendo ogni volta un taglio, fino ad ottenre una soluzione intera.
Schema Generale:
- Si risolve il (RL), se
è intera - Si genera un taglio (nuovo vincolo!)
- Tale che
- Significa: Il taglio è verificato da tutti i punti interi, ma non è soddisfatto dall’ottimo del rilassamento continuo.
- Si risolve il nuovo problema continuo con l’aggiunta del nuovo vincolo
Procedimento ed Efficienza
È un processo molto lungo ed estenuante da fare a mano, per questo in teoria esistono i computer, che possono operare più tagli contemporaneamente per migliorare l’efficienza, ma noi siamo studenti universitari e quindi abbiamo meno diritti delle macchine.
A seconda della scelta del taglio si hanno diversi algoritmi, ma resta comunque l’idea comune di fondo di approssimare l’involucro convesso mediante l’inserimento dei tagli.
Implementazioni:
Una implementazione è il Metodo dei Tagli di Gomory.
Link to original
Metodo dei Tagli di Gomory
Schema Generale:
- Si risolve il (RL), se
è intera - Si genera un taglio (nuovo vincolo!)
- Tale che
- Significa: Il taglio è verificato da tutti i punti interi, ma non è soddisfatto dall’ottimo del rilassamento continuo.
- Si risolve il nuovo problema continuo con l’aggiunta del nuovo vincolo
Procedimento ed Efficienza
È un processo molto lungo ed estenuante da fare a mano, per questo in teoria esistono i computer, che possono operare più tagli contemporaneamente per migliorare l’efficienza, ma noi siamo studenti universitari e quindi abbiamo meno diritti delle macchine.
A seconda della scelta del taglio si hanno diversi algoritmi, ma resta comunque l’idea comune di fondo di approssimare l’involucro convesso mediante l’inserimento dei tagli.
Link to originalMetodo di Gomory
Genera il taglio sfruttando la tabella finale del Simplesso del Rilassamento Lineare (RL).
In particolare, usa la riga della tabella associata ad una componente frazionaria della soluzione ottima del (RL).
Sia data la tabella finale della risoluzione del RL:
— WIP
è frazionario.
non è intero, supponiamo che non sia intero. Procedimento
Scriviamo la riga
esima:
e consideriamo i floor dei coefficienti:
Questo è il taglio di Gomory in forma intera.
Il taglio va aggiunto al rilassamento lineare dopo averlo reso standard. Si aggiunge il vincolo standard:
Come precedentemente detto, la convergenza è lenta. I primi tagli risultano più efficaci, ma lo sono meno continuando ad iterare l’algoritmo.
Se si opera un taglio alla volta e ci sono più valori frazionari si sceglie sempre la riga con indice minore, oppure quella con termine noto che ha la parte frazionaria maggiore.
Link to originalEsempio (Grafico, lungo)
EH, VOLEVI! wip.
Metodo del Branch and Bound
Metodo Branch and Bound
È un metodo molto utilizzato per risolvere problemi PLI.
Si basa sul partizionamento del poliedro del (RL). Si risolvono quindi i sottoproblemi (lineari) sugli insiemi della partizione.
Dato un problema PLI:
Problema PLI
Osservazione
Osservazione
La regione ammissibile di un problema intero non è convessa. In generale possono esservi alcune variabili continue e alcune intere. Si parla in tal caso di PLI mista (che non trattiamo)
Esempio
Esempio Grafico PLI
Se risolviamo il problema senza vincolo di interezza, l’ottimo sarebbe
. Altrimenti:
- Soluzione ottima intera:
- Soluzione arrotondata:
Come è ovvio vedere, non è possibile risolvere il problema intero eliminando il vincolo di interezza e risolvendo il problema continuo approssimando la soluzione.
Bisogna necessariamente risolvere il problema intero.
Relazioni problemi lineari < - > interi
Rilassamento Lineare
Dato un problema PLI (definito sopra), è possibile ottenere un Rilassamento Lineare (RL), o continuo:
Risulta che
, cioè la regione ammissibile del problema di PLI è data dalla soluzione intera del poliedro P. Inoltre
, cioè la reigone ammissibile del problema PLI è sempre contenuta nel poliedro P. Si ha che il valore ottimo di (RL) è sempre
del valore ottimo di (PLI):
Infine:
Se la soluzione ottima di (RL) è intera
Link to originalè soluzione del problema (PLI). e il suo rilassamento lineare:
Rilassamento Lineare
Dato un problema PLI (definito sopra), è possibile ottenere un Rilassamento Lineare (RL), o continuo:
Risulta che
, cioè la regione ammissibile del problema di PLI è data dalla soluzione intera del poliedro P. Inoltre
, cioè la reigone ammissibile del problema PLI è sempre contenuta nel poliedro P. Si ha che il valore ottimo di (RL) è sempre
del valore ottimo di (PLI):
Infine:
Se la soluzione ottima di (RL) è intera
Link to originalè soluzione del problema (PLI). Partizioniamo
nei sottoinsiemi e risolviamo:
Il valore ottimo del problema (PLI) indicato con
Procedimento
Il metodo prevede di partizionare in maniera ricorsiva
e risolvere i vari sottoproblemi e i rispettivi (RL). Si partiziona ogni partizione fino a quando si trova una sol intera o un sottoproblema risulta inammissibile.
Il metodo individua anche le partizioni sulle quali non occorre risolvere il sottoproblema.
Non è un metodo di enumerazione totale.
Esempio (Grafico, WIP)
Non esploro la parte grigia
Descrizione del Metodo
Si basa su due operazioni:
- Bounding: Si risolve un (RL) del problema di (PLI) e si ottiene un lower bound per il valore ottimo intero;
- Branching: La soluzione fornita dal (RL) indica come effettuare il partizionamento
Sia
la soluzione di non intera. avrà qualche componente frazionaria, che chiamiamo Questa
è detta variabile di branch, e genera due sottoproblemi: Se ci sono più componenti frazionarie si può:
- Scegliere quella con parte frazionaria più vicina a
- Scegliere quella con coefficiente della
più elevato.
- Questo rende più probabile trovare la soluzione intera nel ramo
e chiudere invece il ramo Criteri di Potatura
Cioè criteri per chiudere nodi. Ne esistono 3:
- Il vincolo di branch è incompatibile con i vincoli del problema, che risulta inammissibile;
- Si trova una soluzione intera;
- Chiusura per bounding: si risolve un sottoproblema lineare continuo che dà una soluzione non intera e il suo valore ottimo è peggiore del valore ottimo corrente del problema intero
Osservazione
Il branching può essere binario, ma anche di dimensioni maggiori, dipende dal problema.
Strategie di visita
Visita in Profondità (DFS)
Si risolve il primo figlio di ogni nodo, fino a quando non si deve risalire.
Minimizza il numero di nodi aperti da esplorare, e ha bassi requisiti di memoria. Inoltre, si ottiene rapidamente una soluzione intera.
Lo svantaggio è dovuto al fatto che si possono dover risolvere molti problemi (e quindi nodi da esplorare)
Visita per bound migliore
Si risolve prima il problema con valore ottimo migliore. Se minimizziamo, scegliamo il problema con lower bound inferiore.
In tal caso, si esplorano meno nodi, ma ne restano molti aperti. C’è maggiore richiesta di memoria, ed è possibile che se si arresta l’algoritmo prima non si trovi una soluzione intera.
Difatti, risulta più efficiente unire le due strategie:
- Si fissa il numero max di nodi aperti consentiti;
- Si applica il best bound;
- Raggiunto il limite di nodi aperti, si procede con l’esplorazione DFS.
Upper Bound
Un upper bound per il valore ottimo del problema intero si ottiene calcolando la
nella prima soluzione intera disponibile. Dato
Lower Bound Upper Bound Risolvendo i (RL) Valore della f.o. calcolato in una sol. intera Problema di Massimizzazione
I (RL) forniscono degli upper bound per il valore ottimo intero.
La f.o. dà invece un lower bound
Cioè il contrario di quanto detto prima.
Chiusura per Bounding
Come prima, se il valore ottimo ottenuto risolvendo un sottoproblema con soluzione non intera è minore del valore ottimo corrente si chiude il nodo.
Esplorazione per Best Bound
Si seglie il sottoproblema con ottimo maggiore.
Link to original
Problema dello Zaino
Sia
un insieme di oggetti. Ad ogni oggetto
si associano un profitto e un peso , entrambi interi positivi. Sia
la capacità. Problema dello Zaino
Consiste nello scegliere quali oggetti inserire nello zaino in modo da massimizzare il profitto, rispettando il vincolo sulla capacità.
Definizione Formale
Il problema fa parte dei problemi di riempimento.
Problema di Riempimento
Siano
sottoinsiemi di e sia il profitto associato ad ogni . Il problema di riempimento consiste nel determinare la sottofamiglia
degli insiemi che sia di profitto massimo e tale che ogni elemento di appartenga al più ad un solo sottoinsieme di . Approccio Euristico
Si costruisce una soluzione inserendo nello zaino per primi gli elementi migliori secondo un certo criterio.
Ci sono tre criteri:
- Peso non decrescente (inseriamo molti oggetti)
- Profitto non decrescente (inseriamo oggetti di maggior valore)
- Rapporto profitto/peso decrescente (più efficace)
Comunque con questo approccio non si arriva all’ottimo
Metodo (esatto) Branch and Bound per lo zaino
Per applicare il Metodo del Branch and Bound dobbiamo specificare:
- Come ottenere l’upper bound
- Come fare branching
- Come ottenere un lower bound
Per l’operazione di bounding adottiamo l’eliminazione del vincolo di interezza (RL|), perciò risolviamo il problema di PL:
Si potrebbe usare il simplesso ma è più efficace un altro metodo.
Si sceglie il criterio di ordinamento
decrescente. Si ordinano gli oggetti secondo questo criterio e si inizia l’inserimento. Supponiamo che si possano inserire i primi
oggetti, ma non l’oggetto
e
Inseriamo per intero i primi
oggetti: Mentre l’oggetto
sarà inserito frazionalmente (in parte):
Lo zaino è pieno
Il valore ottimo è
infatti è detta variabile critica ed è la variabile di branch, che effettua la partizione. Un Lower Bound si ottiene considerando come Soluzione Intera Ammissibile l’arrotondamento per difetto della soluzione del
rilassamento lineare .
Soluzione
L’arrotondamento è:
e il lower bound:
Come strategia si usa in genere il best bound.
Link to originalEsempio (WIP)
Problema dell'assegnamento
Siano A e B due insiemi tali che
e . Sono dati dei costi agli abbinamenti tra gli elementi di
e . Il problema degli assegnamenti consiste nell’assegnare ad ogni elemento di A un solo elemento di
in modo che non ci siano elementi non accoppiati e il costo totale sia minimo. Se
si aggiungono elementi fittizi e costi nulli degli abbinamenti con elementi fittizi. Formulazione Matematica
È un particolare problema del trasporto con domanda e offerta = 1.
La matrice dei coefficienti è Totalmente Unimodulare
Matrice Unimodulare
Matrice Unimodulare
Una matrice
si dice totalmente unimodulare quando ogni sottomatrice di ordine ha determinante Proposizione
Dato il poliedro
con A matrice tot. unimodulare, e b intero poliedro ha solo vertici interi Possiamo quindi risolvere il problema rilassato con il vincolo
(insieme agli altri vincoli diventa poi solo) ) Non è utile usare il simplesso perché il poliedro ha vertici fortemente degeneri, si usa infatti un algoritmo specifico:
Algoritmo Ungherese
Opera sulla matrice dei costi
e trasforma la matrice dei costi in una serie di matrici equivalenti fino a determinare l’assegnamento di costo minimo che corrisponderà al ricoprimento degli zeri della matrice. Operazioni
- Si sottrae ad ogni riga il suo elemento minimo:
(generiamo zeri sulle righe) - Si sottrae ad ogni colonna il suo elemento minimo:
(generiamo zeri su colonne) - Si cerca l’assegnamento di costo minimo, cercando il ricoprimento degli zeri della matrice. Se il numero di righe e colonne che ricoprono gli zeri è minore del numero di righe della matrice, l’assegnamento non è completo e si deve ridurre ancora la matrice. Altrimenti, si è trovato l’assegnamento completo di costo minimo
- Si barrano le righe e le colonne che ricoprono gli zeri. Sia
l’elemento minimo non barrato. Si aggiunge agli elementi barrati 2 volte (cioè l’incrocio tra riga e colonna) e si sottrae agli elementi non barrati. Si ripetono
e fino a trovare l’assegnamento completo Regola generale per trovare il ricoprimento minimo degli zeri
Link to original
- Si etichettano le righe lasciate fuori dall’assegnamento;
- Si etichettano le colonne che hanno degli zeri in corrispondenza delle righe etichettate;
- Si etichettano le righe abbinate alle colonne etichettate dall’assegnamento ottenuto;
- Si barrano le righe non etichettate e le colonne etichettate.
Assegnamento su Grafo Bipartito
Il problema dell’assegnamento si può vedere su un grafo bipartito completo. Siano noti i costi
su tutti gl iarchi e si cerca un abbinamento tra gli elementi dei due insiemi di costo minimo. Link to original
Algoritmo Ungherese
Opera sulla matrice dei costi
e trasforma la matrice dei costi in una serie di matrici equivalenti fino a determinare l’assegnamento di costo minimo che corrisponderà al ricoprimento degli zeri della matrice. Operazioni
- Si sottrae ad ogni riga il suo elemento minimo:
(generiamo zeri sulle righe) - Si sottrae ad ogni colonna il suo elemento minimo:
(generiamo zeri su colonne) - Si cerca l’assegnamento di costo minimo, cercando il ricoprimento degli zeri della matrice. Se il numero di righe e colonne che ricoprono gli zeri è minore del numero di righe della matrice, l’assegnamento non è completo e si deve ridurre ancora la matrice. Altrimenti, si è trovato l’assegnamento completo di costo minimo
- Si barrano le righe e le colonne che ricoprono gli zeri. Sia
l’elemento minimo non barrato. Si aggiunge agli elementi barrati 2 volte (cioè l’incrocio tra riga e colonna) e si sottrae agli elementi non barrati. Si ripetono
e fino a trovare l’assegnamento completo Regola generale per trovare il ricoprimento minimo degli zeri
Link to original
- Si etichettano le righe lasciate fuori dall’assegnamento;
- Si etichettano le colonne che hanno degli zeri in corrispondenza delle righe etichettate;
- Si etichettano le righe abbinate alle colonne etichettate dall’assegnamento ottenuto;
- Si barrano le righe non etichettate e le colonne etichettate.
Problema del Commesso viaggiatore
Branch and Bound per il problema del TSP Asimmetrico
Sia dato un grafo
orientato, il problema del commesso viaggiatore (TSP) consiste nel determinare un Ciclo Hamiltoniano di costo minimo. Ciclo Hamiltoniano
Si ha un ciclo hamiltoniano quando in un cammino hamiltoniano esiste un arco che collega l’ultimo vertice con il primo, realizzando così un ciclo che visita tutti i vertici per poi ritornare al punto di partenza.
Link to originalQuindi, assegnati dei costi agli archi, si vuole determinare il ciclo che tocchi ogni nodo di G una e una sola volta e che abbia costo minimo
Formulazione Matematica TSP
Per applicare il Metodo del Branch and Bound al TSP dobbiamo capire, anche qui:
- Come ottenere l’upper bound
- Come fare branching
- Come ottenere un lower bound
Troviamo un lower bound, eliminando i vincoli sui sottocicli.
Così otteniamo il Problema dell’assegnamento.
L’assegnamento si opera sul grafo bipartito completo che si ottiene duplicando i nodi di G.
Se l’assegnamento dà un ciclo hamiltoniano, abbiamo la soluzione del TSP.
Altrimenti, vuol dire che ci sono dei sottocicli
Li possiamo usare per il branching. La dimensione del branching sarà pari alla cardinalità minima dei sottocicli. Dalla soluzione dell’assegnamento, prendiamo il sottociclo di cadinalità minima e generiamo tanti problemi quanti sono gli archi di tale sottociclo.
Regola Generale TSP
Dato il sottociclo
Si generano i vincoli di branching imponendo per il primo figlio
, per il secondo figlio , e così via fino al figlio k-esimo, per il quale tutti i precedenti saranno 1 e per se stesso 0. Imporre che
vuol dire richiedere che nella matrice dei costi Upper Bound
Si determina con l’algoritmo del nodo più vicino.
Si parte dal primo nodo e si cerca il nodo successivo connesso con costo minimo.
Esaminati tutti i nodi si trova un ciclo hamiltoniano.
Link to original
Programmazione Non Lineare
Programmazione Non Lineare
Programmazione non lineare
Nei problemi di ottimizzazione non lineare la funzione obiettivo e/o le funzioni dei vincoli sono non lineari. Esistono alcuni problemi non lineari che possono essere trasformati in problemi lineari
In generale però, i problemi non lineari restano tali e si affrontano con determinati metodi. Possono essere di due tipi:
- Se
il problema si dice non vincolato. - Se
Il problema si dice vincolato: Si pone sempre
, altrimenti l’insieme potrebbe risultare vuoto, oppure potrebbero esserci vincoli ridondanti. I problemi non vincolati sono problemi in cui effettivamente l’insieme ammissibili coincide con tutto lo spazio.
Nelle applicazioni sono considerati non vincolati i problemi con insieme ammissibile aperto.
In tal caso infatti i punti di ottimo sono interni e possono essere caratterizzati solo dall’andamento della funzione obiettivo.
Problemi non vincolati
Sia dato un problema di PNL non vincolata:
Una soluzione locale
deve soddisfare una condizione necessaria di ottimalità. Si osserva che i punti che soddisfano una condizione necessaria di ottimalità non sono forzatamente soluzioni del problema: potrebbero ad esempio essere di max e non di minimo Condizioni di Ottimalità
Condizioni Necessarie e Sufficienti
Una condizione necessaria puo servire a restringere l’insieme di punti in cui cercare la soluzione e a costruire algoritmi che soddisfano la condizione necessaria.
Una condizione sufficiente puo servire a dimostrare che un punto ottenuto per via numerica sia una soluzione ottima
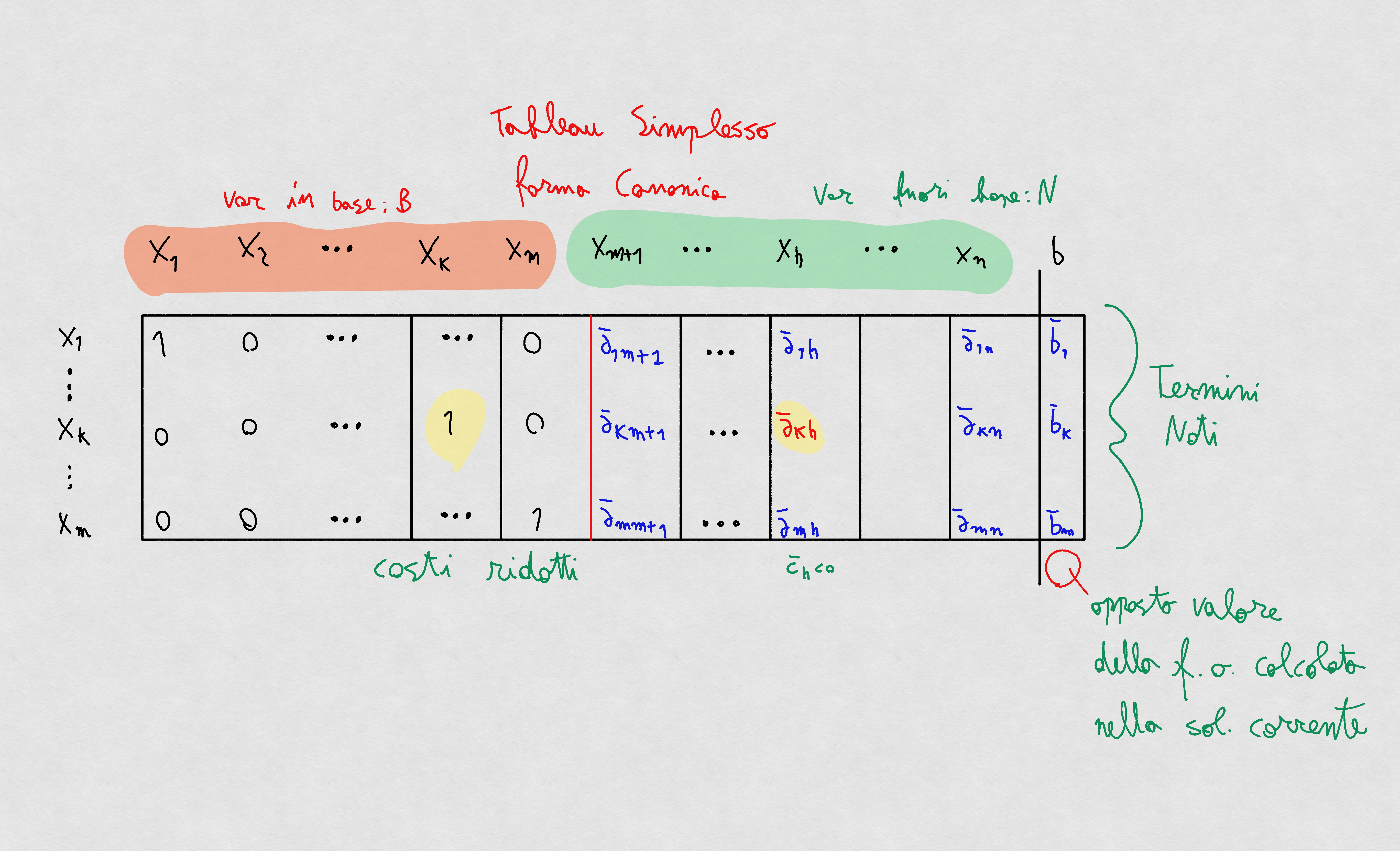
Condizione Necessaria del Primo Ordine
Teorema
Sia
un punto di minimo locale. Se è differenziabile in , allora in La condizione necessaria fornisce i punti stazionari candidati ad essere punti minimali.
Se il problema è convesso, la condizione diventa necessaria e sufficiente.
Condizione Sufficiente del Secondo Ordine
Teorema
Sia
un punto di minimo locale. Se è differenziabile due volte in , allora in e la matrice hessiana è semidefinita positiva Condizione Necessaria del Secondo Ordine
Sia
un punto interno della regione ammissibile e , e differenziabile due volte in :
- Se la matrice hessiana è definita positiva, allora
è punto di minimo locale; - Se la matrice hessiana è definita negativa allora
è punto di massimo locale; - Se la matrice hessiana è indefinita, allora
è un punto di sella - Se la matrice hessiana è semidefinita non si può dire niente
Regolarità dei vincoli di uguaglianza
Condizione di Ottimalità del primo ordine
Forma Equivalente
Link to originalFunzione Lagrangiana
Problemi con vincoli di uguaglianza e disuguaglianza
Regolarità dei vincoli
Link to originalCondizioni KKT
Condizioni di ottimalità del primo ordine-KKT
Teorema: Condizioni di Karush-Kuhn-Tucker
Funzione Lagrangiana
Schema Condizioni Ottimalità
Problema Convesso
Link to original
Condizioni di Ottimalità
Condizioni Necessarie e Sufficienti
Una condizione necessaria puo servire a restringere l’insieme di punti in cui cercare la soluzione e a costruire algoritmi che soddisfano la condizione necessaria.
Una condizione sufficiente puo servire a dimostrare che un punto ottenuto per via numerica sia una soluzione ottima
Condizione Necessaria del Primo Ordine
Teorema
Sia
un punto di minimo locale. Se è differenziabile in , allora in La condizione necessaria fornisce i punti stazionari candidati ad essere punti minimali.
Se il problema è convesso, la condizione diventa necessaria e sufficiente.
Condizione Sufficiente del Secondo Ordine
Teorema
Sia
un punto di minimo locale. Se è differenziabile due volte in , allora in e la matrice hessiana è semidefinita positiva Condizione Necessaria del Secondo Ordine
Sia
un punto interno della regione ammissibile e , e differenziabile due volte in :
- Se la matrice hessiana è definita positiva, allora
è punto di minimo locale; - Se la matrice hessiana è definita negativa allora
è punto di massimo locale; - Se la matrice hessiana è indefinita, allora
è un punto di sella - Se la matrice hessiana è semidefinita non si può dire niente
Regolarità dei vincoli di uguaglianza
Condizione di Ottimalità del primo ordine
Forma Equivalente
Link to originalFunzione Lagrangiana
Condizioni KKT
Condizioni di ottimalità del primo ordine-KKT
Teorema: Condizioni di Karush-Kuhn-Tucker
Funzione Lagrangiana
Schema Condizioni Ottimalità
Problema Convesso
Link to original
Schema Condizioni Ottimalità
da sostituire
Link to original